第八章 非线性控制系统分析¶
1 上课笔记¶
EXAM NOTIFICATION
填空选择非线性控制系统的特征 3 点:
- 稳定性/输出瞬态响应:与输入信号和初始条件有关(这条可能会考)
1. 系统输出的瞬态过程曲线形状与输入信号大小和系统初始条件有关。
2. 系统的稳定性也与输入信号大小和初始条件有关。 - 自激振荡
- 频率响应发生畸变
需要记得公式不考
5 分大题描述函数法
把课本/课件上的例题好好看看就可以了!
判断交点处自激振荡的稳定性,求交点处频率与幅值.
只考简单的概念,没有复杂的计算.
线性系统与非线性系统
线性系统只是在特定条件下的近似描述
能否应用叠加定理是线性系统与非线性系统的本质区别。
稳定性分析复杂: 无外力作用,且系统输出各阶导数为 0 时,系统处于平衡状态.
线性系统只有一个平衡点 y=0
非线性系统可能有多个平衡点,只不过可能是不稳定的平衡点.
可能存在自激振荡现象
频率响应发生畸变: 输出存在高次谐波(分频?)
非线性类型:
- 饱和:设计得当可以使超调量小且稳态误差小
- 死区特性:系统存在稳态误差(稳态特性), 降低了系统的跟踪精度(动态特性), 减小扰动信号影响
- 滞环/间隙特性:相当于死区,降低跟踪精度. 运动变化更加剧烈,不利于稳定性.
- 继电特性:往往使系统产生震荡
- 继电特性+滞环特性=非单值继电特性
- 继电特性+死区特性=单值且有死区继电特性
- a+b+c=非单值且有死区继电特性
- 摩擦:低速运动不平滑性
非线性系统分析方法
- 存在线性工作区域:线性化处理,线性分析再修正
- 小偏差线性化法(系统方程解析且工作在某一数值附近的较小范围内)
- 分段线性化法
- 反馈线性化
- 不存在线性工作区域
- 描述函数法
- 相平面法
- (课本上还有一个逆系统法)
线性系统时域分析都是初始值为零,输入阶跃信号.
非线性系统往往初始值不为零,分析无输入(只有干扰)时的情况(或者理解为观察冲激响应?)
相平面法
\(\ddot{x}=f(x,\dot{x})\)
\(\ddot{x}=d\dot{x},\dot{x}=dx\)
\(\frac{d\dot{x}}{dx}=\frac{f(x,\dot{x})}{\dot{x}}\)
相平面图的绘制
- 解析法
- 直接积分获得\(f(x,\dot{x})=0\)相轨迹方程
- 消除参变量法:消除 t
- 图解法/作图法:等倾线法
- 实验法
另外,如果分段解析的话,可分情况做出不同区域的相轨迹.
解析法思路总结:
-
根据\(\frac{d\dot{x}}{dx}=\frac{f(x,\dot{x})}{\dot{x}}\)积分可以获得\(f(x,\dot{x})=0\)曲线.
对\(\dot{x}d\dot{x}=f(x,\dot{x})dx\) 进行积分时,需要注意\(x,\dot{x}\)都是时间的函数,左右同时积分时,积分上下限的确定:
\(t:0\to t\)
\(x(t):x(0)\to x(t)\)简写为\(x_0\to x\)
\(\dot{x}(t):\dot{x}(0)\to \dot{x}(t)\)简写为\(\dot{x}_0\to \dot{x}\) -
积分困难,可以分别求出\(x(t),\dot{x}(t)\), 消去 t 画曲线
-
如果还是难以消去 t, 就描点作图
相轨迹每一点切线处的斜率为:\(\frac{d\dot{x}}{dx}=\frac{f(x,\dot{x})}{\dot{x}}=\alpha\)
奇点:平衡点\(\frac{\ddot{x}}{\dot{x}}=\frac00\), 斜率不定
斜率不定,则相轨迹方向任意,说明这是各个相轨迹交汇处.
奇点有可能是发射点也有可能是收敛点。当奇点为收敛点时,代表了系统的稳定工作状态.
对线性系统来说,只有一个平衡状态——即对应一个奇点,
但对于非线性系统来说,可能有多个平衡状态,即对应多个奇点。
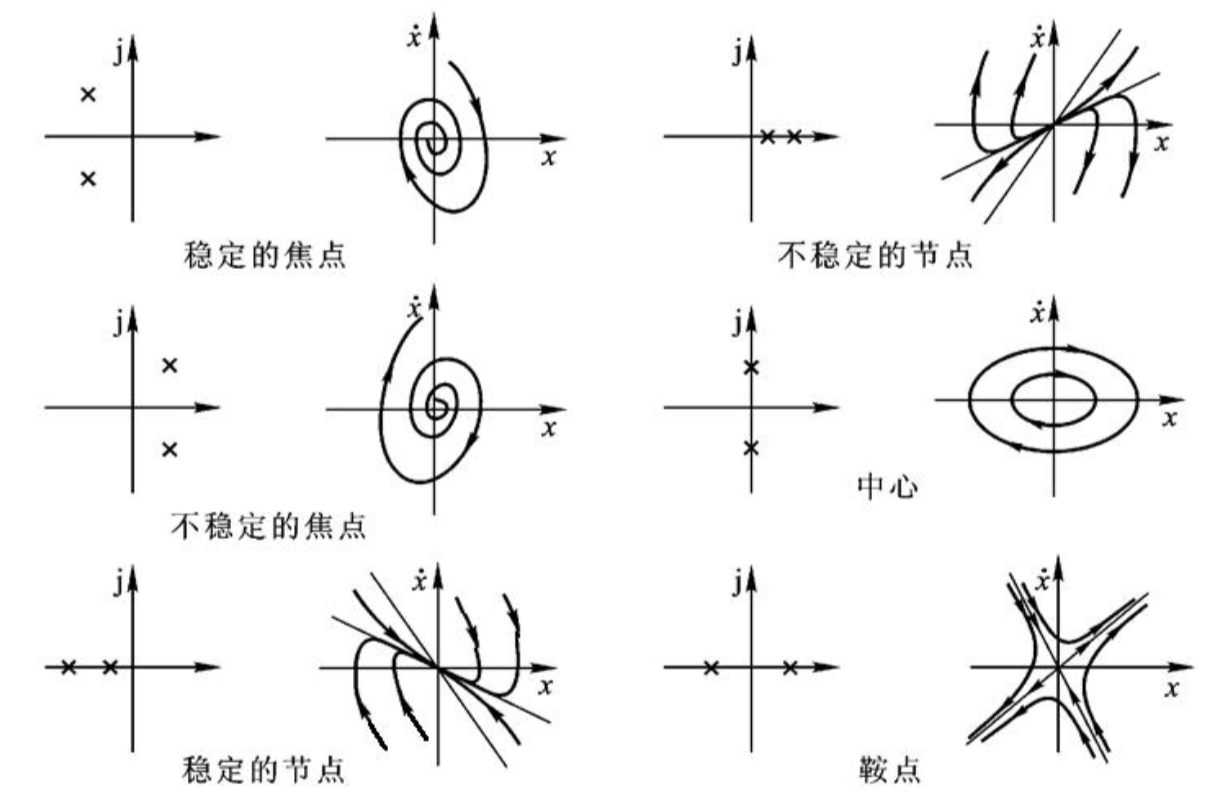
根据奇点附近相轨迹变化,奇点可分为稳定焦点、不稳定焦点、稳定节点、不稳定节点、中心点和鞍点
线性二阶系统的奇点分类:
- 焦点
- 震荡收敛(二阶欠阻尼)(负实部共轭复根)
- 震荡发散(二阶负阻尼\(-1<\xi<0\))(正实部共轭复根)
- 节点
- 单调收敛(二阶过阻尼)(两个负实根)
- 单调发散(二阶负阻尼\(\xi<-1\)>>)(两个正实根)
- 中心点:到达不了(虚轴极点)
- 鞍点(一个正实根,一个负实根)
等倾线法思路总结:
- \(\frac{d\dot{x}}{dx}=\frac{f(x,\dot{x})}{\dot{x}}=\alpha\)画出的曲线上,如果相轨迹穿过这条曲线,那么穿越点处斜率一定为\(\alpha\)
- 通过绘制等倾线,我们可以知道任意一个地方的相轨迹斜率
- 等倾线法就是通过等倾曲线以及初始点,获得近似的相轨迹.
- 例如我们从一个点\((x,\dot{x})\)出发
- 先看这个点位置的斜率,以及接下来到达的等倾线的斜率
- 两个斜率取平均作为从这个点出发的斜率
- 这个点以平均斜率出发到达下一个等倾线
- 重复上述步骤
极限环与自激振荡的稳定性:
当等倾线不是直线时,相轨迹可能到达一个闭合的环,代表了系统稳定的震荡.
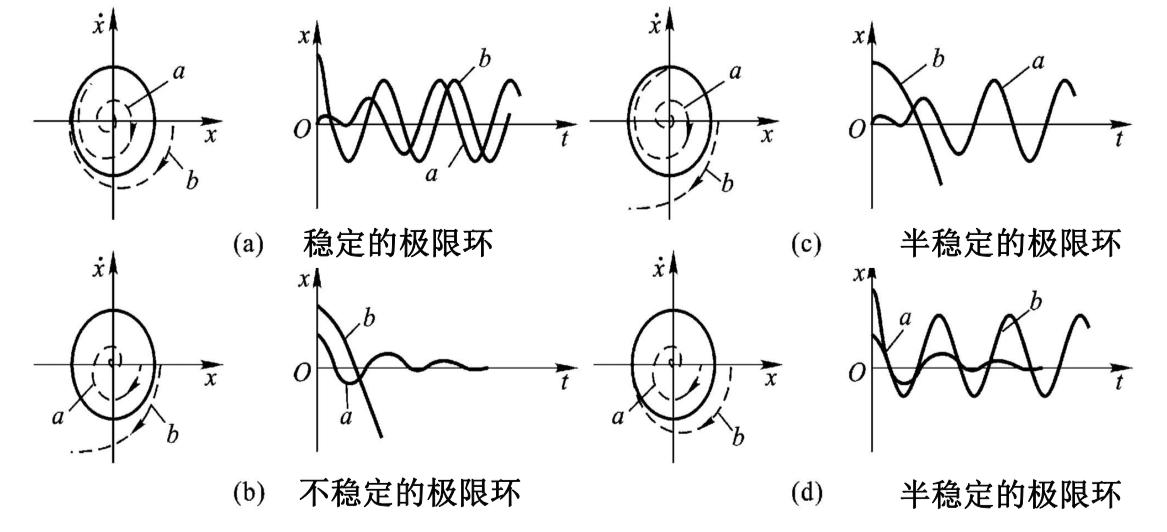
半稳定极限环是不会稳定震荡的,总是会有微小的扰动偏离极限环,最后发散或者回到奇点.
自激振荡的稳定性:假如说系统到达了自激振荡点,如果带来一个扰动,系统能稳定回归到自激振荡点.
与系统稳定性是不同的概念。
同理极限环的稳定性是指能够稳定产生自激振荡,而非系统稳定.
在描述函数法中,\(-\frac{1}{N(A)}\)与\(G(j\omega)\)存在交点则存在自激振荡点,通过扰动使震荡幅值增大/减小来判断工作点能否回到自激振荡点.
描述函数法
当系统满足一定的假设条件时,系统中非线性环节在正弦信号作用下的输出可用一次谐波(基波?) 分量来近似. 由此导出非线性环节的近似等效频率特性,即描述函数.
描述函数用来分析无外力作用的情况下,非线性系统的稳定性和自震荡问题.
- 优点:不受系统阶次限制,可以分析频率特性
- 缺点:系统首先得适合近似,不可以分析时域特性
描述函数不用背,考试会给,但是应该需要会分析.
MyOpinion:
将非线性环节合成一个部分,
并简化为一个不改变正弦信号频率, 只改变幅值和相位的
不随时间改变的描述函数.(相当于复数增益的放大器)
分析情况:无输入时的系统自激振荡现象,即研究对象是单一频率正弦波(不含直流分量)
综上,通过限制信号为正弦信号以及对非线性环节近似,将一个非线性系统简化为了"线性时不变系统",并使用频率法进行分析.
- 系统结构一定是/一定能化成下述的形式.
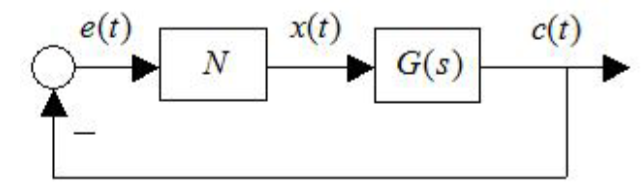
系统结构 - 非线性部分的输入输出特性是不随时间改变的 x 的奇函数\(f(x)\), 或者正弦输入下的输出为 t 的奇对称函数\(y(t)\), 即输出不含直流分量,即非线性是对称的.
- 线性部分 G 需要较好地滤除高频(来自非线性环节,这样可以更好地拟合)
- 非线性元件只有一个正弦输入(系统自激振荡时,N 的输入也是正弦波)
系统结构化简方法小总结:
当系统框图结构不满足描述函数法要求的结构时,需要进行化简.
- 利用相同特征方程进行化简:只是部分等效(传递函数极点相同), 这样似乎只是判断稳定性(吧)
- 求出\(\Phi(s)=\frac{C(s)}{R(s)}\), 模块使用 N,G 表示
- 取特征方程,即\(\Phi(s)\)的分母
- 化成\(1+NG'=0\)的形式,\(G'\)就是等效的
- 利用信号传递关系等效变换
MyOpinion:
关键点有 N 的输入端 xe(t),N 的输出端 yx(t), 以及系统输出端 Cc(t)
找到从 y 出发回到 x 的回路,这个回路上所有的线性模块合并为右图的G(s), 这样可以画出来一个单位负反馈的环了.
因为上面为了凑出来单位负反馈,把原来反馈回路的给合并到G(s)里了,所以找到从 y 到达 C 的部分,在G(s)引出负反馈的端口右边再填上补偿环节,让 y 到达 C 的传函满足原本的关系.
描述函数\(N(A,j\omega)=\frac{\dot{X_1}}{\dot E}=\frac{B_1}{A}+j\frac{A_1}{A}\)
输出基波分量的复数相量/正弦输入的复数相量
- 输入正弦信号
- 获得输出信号(需要检验不含直流分量,含的话就不能用这个方法分析了)
获得基波分量正弦信号求\(A_1,B_1,X_1,\varphi_1\)- 获得描述函数\(N(A,j\omega)\)
当非线性环节中不包含储能元件时,其输出的一次谐波分量的幅值和相位差与\(\omega\)无关,因此描述函数只是输入正弦信号幅值的函数\(N(A)\)
这里的\(x(t)\)是非线性环节的稳态输出.
非线性系统简化
- 并联:描述函数线性相加
- 串联:图解法化简(有点像高中学的复合函数)
描述函数法分析非线性系统稳定性
(描述函数分析非线性系统自激振荡)
- 实际是线性系统频域分析方法的扩展,复杂程度依次为:
- 线性系统恒定增益:一个点-1
- 线性系统变增益:\(-\frac{1}{K_1}\to-\frac{1}{K_2}\)
- 线性系统复数增益(描述函数):\(-\frac{1}{N|_{A=0}}\to-\frac{1}{N|_{A=\infty}}\)
- 下述方法只适用于\(G(s)\)不具有右极点的情况,如果\(G(s)\)具有低通特性,则\(G(s)\)应当不具有右极点.
系统特征方式\(1+N(A)G(j\omega)=0\)
之前看 Nyquist 曲线与-1 点之间的关系判断稳定性.
现在看 Nyquist 曲线与曲线\(-\frac{1}{N(A)}\)的关系
MyOpinion: 之前是固定了一个点,看奈氏曲线是否包围这个点 (-1,0) 判稳. 现在是一个点集,对于每一个点,分别看奈氏曲线是否包围这个点.
当曲线包围点 P 时,系统不稳定,幅值将增大.
当曲线不包围点 P 时,系统稳定,幅值将减小.
当曲线穿过点 P 时,系统临界稳定,处于等幅振荡状态.
- 奈氏曲线 A(此处记为曲线\(\Gamma_G\)) 不包围负倒描述函数曲线 B(此处记为曲线\(\Gamma_N\)), 系统总是稳定
- A 包围 B, 系统总是不稳定
- A 与 B 有交点,交点处是系统周期运动的点,\(G(j\omega)\)确定频率,\(-\frac{1}{N(A)}\)确定幅值.
计算方法之一:实部对应相等,虚部对应相等
判断周期运动是否稳定(是否是稳定的自激振荡点):
- 给一个小扰动
- 交点 P 移动到点 Q
- 看点 Q 是否被奈氏曲线包围,判断稳定性
- 不稳定,震荡幅值将增大
- 稳定,震荡幅值将减小
- Q 点沿着负倒描述函数曲线幅值 A 增大的方向走,看看能不能回到 P 点
结论:
\(\Gamma_G\)包围区域是不稳定区域,不包围的区域是稳定区域,曲线上是等幅振荡的临界区域.
\(\Gamma_N\)与\(\Gamma_G\)相交时,如果沿着 A 增加的方向,从不稳定区域进入稳定区域,则交点处对应稳定的周期运动;从稳定区域进入不稳定区域,则交点处对应不稳定的周期运动.