第四章 线性系统的根轨迹法¶
写在前面
MATLAB 可以精确绘制根轨迹,手绘的意义在于理解根的变化规律.
所以重点应该在于理解不同操作对根轨迹的影响,而非手绘复杂根轨迹(需要一定的经验).
1 概念¶
分母 = 0 即 \(1+G(s)=0\) 即为根轨迹方程.
注意区分根轨迹增益,开环增益
- 根轨迹增益 \(1+K^*G=0\) (G 必须要写成首一式)
- 首一式即 s 的系数为 1, 比如说 \((-s+1)\to-(s-1)\), 还有\(s^n+...\)
- 参数根轨迹下,要把变化的参数化成 根轨迹增益
- 根轨迹增益从 0 到无穷大,画出根轨迹.
- 开环增益 \(G(s)\)
- 闭环系统性能 \(e_{ss}=\frac AK\) , 分母是开环增益.
2 根轨迹性质与绘制方法¶
- 相角条件:\(\sum_{j=1}^{m}\angle\left(s-z_{j}\right)-\sum_{i=1}^{n}\angle\left(s-p_{i}\right)=(2k+1)\pi\quad(k=0,\pm1..)\)
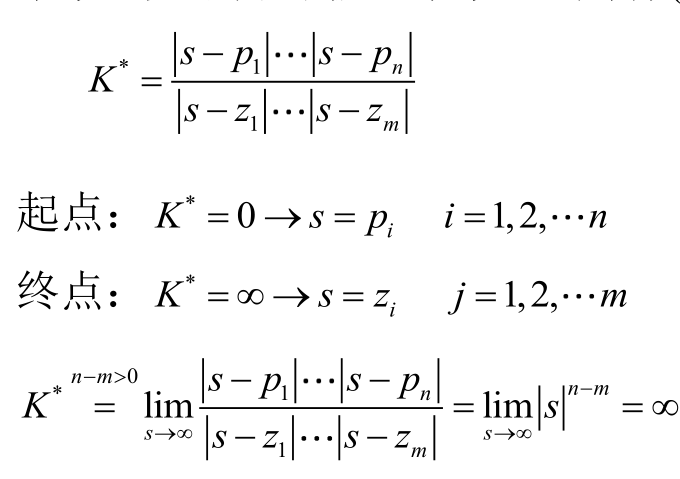
确定根轨迹,一般等式右边取 \(-180^\circ\) 时更好算 - 模值条件:\(K^{*}=\frac{\prod_{i=1}^{n}\left|s-p_{i}\right|}{\prod_{j=1}^{m}\left|s-z_{j}\right|}\)
确定参数 K
一个点,满足相角条件(充要条件)一定在根轨迹上,
一个点,无论在不在根轨迹上,都能通过模值条件(必要条件)确定一个 K
对称性: (与奈式曲线区分)
- 根轨迹:K 0→∞, 180 度根轨迹;K 0→-∞, 0 度根轨迹. 两段根轨迹并不对称.
但根轨迹关于实轴对称 (如果有复数极点,必定共轭)
另外有一定理:开环零极点均为偶数且对称分布于某纵轴(平行于虚轴的直线)左右,则根轨迹对该纵轴对称 - 奈式曲线:\(\omega=0\to\infty\), 和 \(\omega=0\to-\infty\) 关于极轴对称
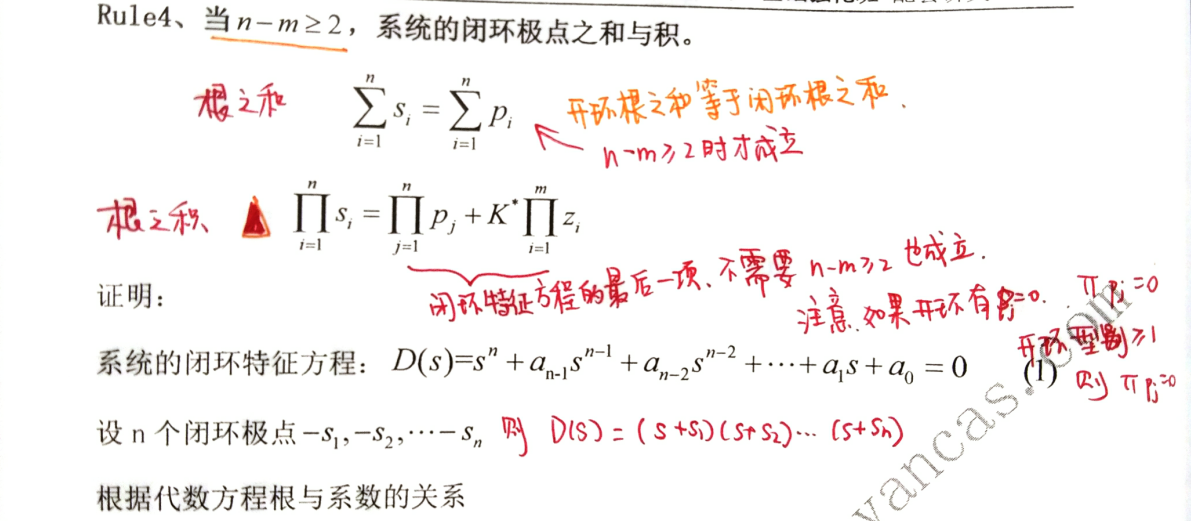
根之和与根之积
根之和: 闭环系统极点之和等于开环系统极点之和且为常数
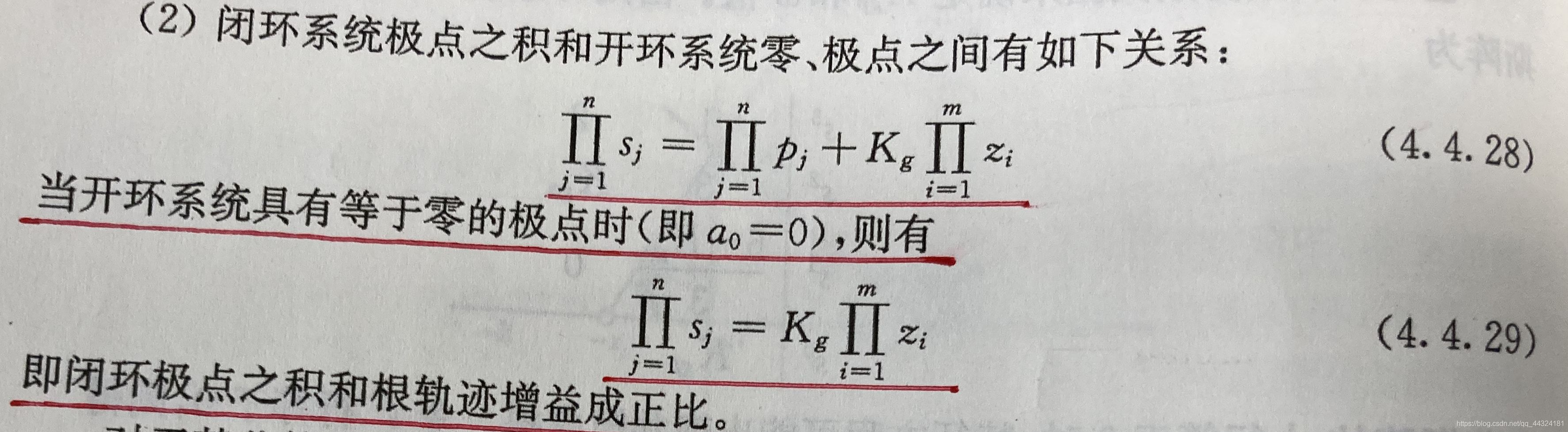
根之积:
2.1 绘制根轨迹的基本法则 x8¶
画根轨迹前,列出开环传递函数,写出开环增益 K 的表达式,和系统型别。
🌟起点和终点:根轨迹起始于开环极点,终止于开环零点;
如果开环零点个数 m 少于开环极点个数 n ,则有 (n-m) 条根轨迹终止于无穷远处(广义零点)。
如果开环零点个数 m 大于开环极点个数 n ,则有 (m-n) 条根轨迹起始于无穷远处(广义极点)。(现实系统是因果系统,该情况只会出现理论分析中)
🌟根轨迹的分支数及对称性:分支数 = \(D(s)\) 阶数 = \(max(m, n)\) = 特征根个数
一般情况下,开环传函 \(G(s)\) 分母阶数 n 更高,所以分支数即为极点数.
🌟实轴上的根轨迹:从实轴最右端的开环零极点算起,奇数开环零极点到偶数开环零极点间一定是根轨迹,否则一定不是.
复数极点两两共轭,不影响实轴上极点的相角条件
如果是零度根轨迹,则从实轴最右端的无穷远点算起
Note
定理:当开环极点有 2 个,开环零点有 1 个,并且在复平面上有根轨迹时,则复平面上的根轨迹一定是以零点为圆心的圆弧。
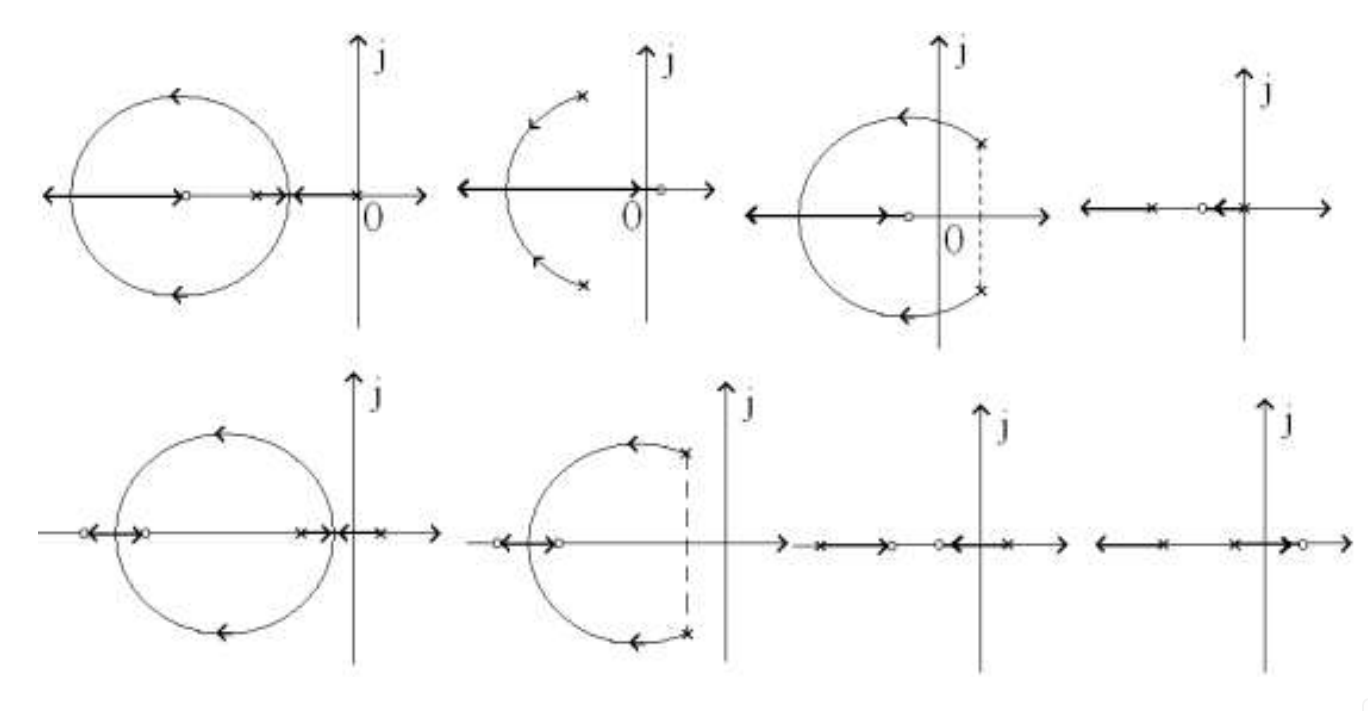
绘制根轨迹有一定的经验加成,形成感性理解(例如根要向零点走,零点就像提供了引力一样,根轨迹就变成了圆弧;还比如几个极点相会互相排斥,要按照最佳的方式分开,即均匀分配这 360°), 根轨迹该怎么走就能猜个大概.
🌟根之和(注意适用条件)
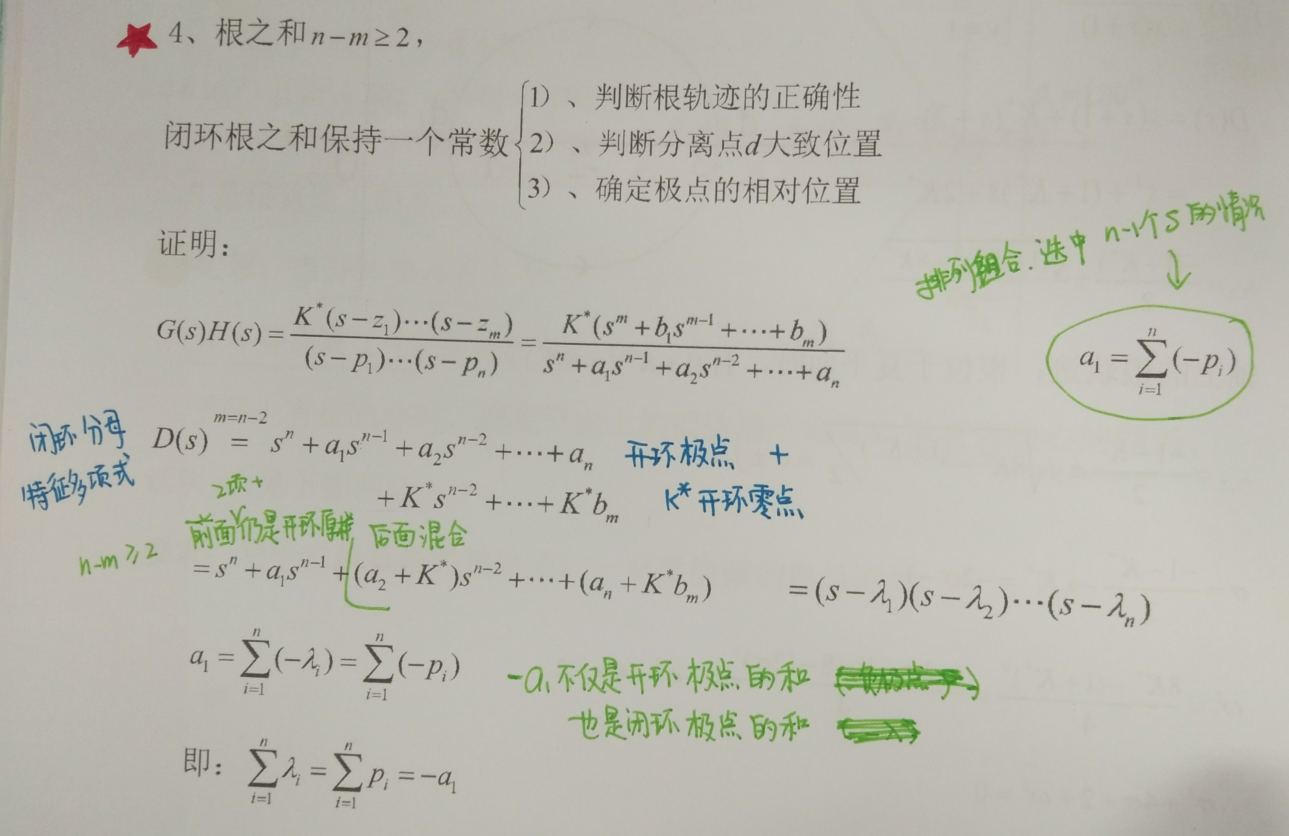
- 作用一:定性判断根轨迹变化趋势,一部分极点往左移,必定有另一部分往右移,互相抵消
- 作用二:根据已知极点计算未知极点
🌟渐近线
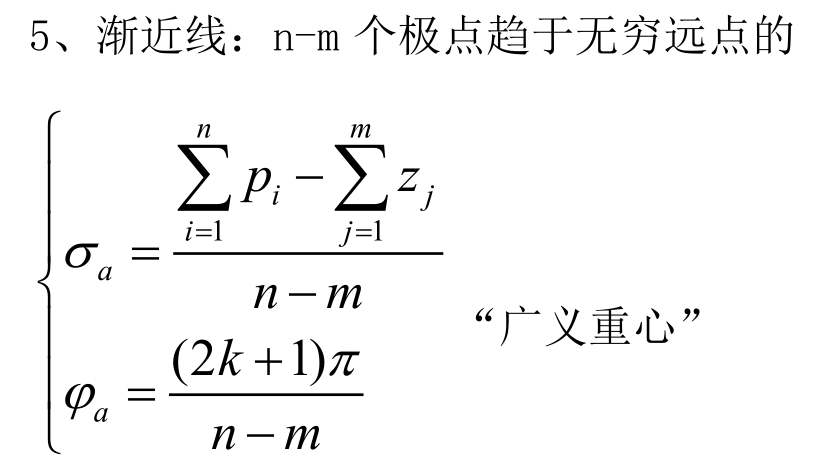
卢京潮第 14 节课(上)有证明,通过跟轨迹方程.
"广义重心": s 位于无穷远点时,所有零极点对于 s 来说都是同一个位置,这个位置就是重心/质心 \(\sigma_i\)
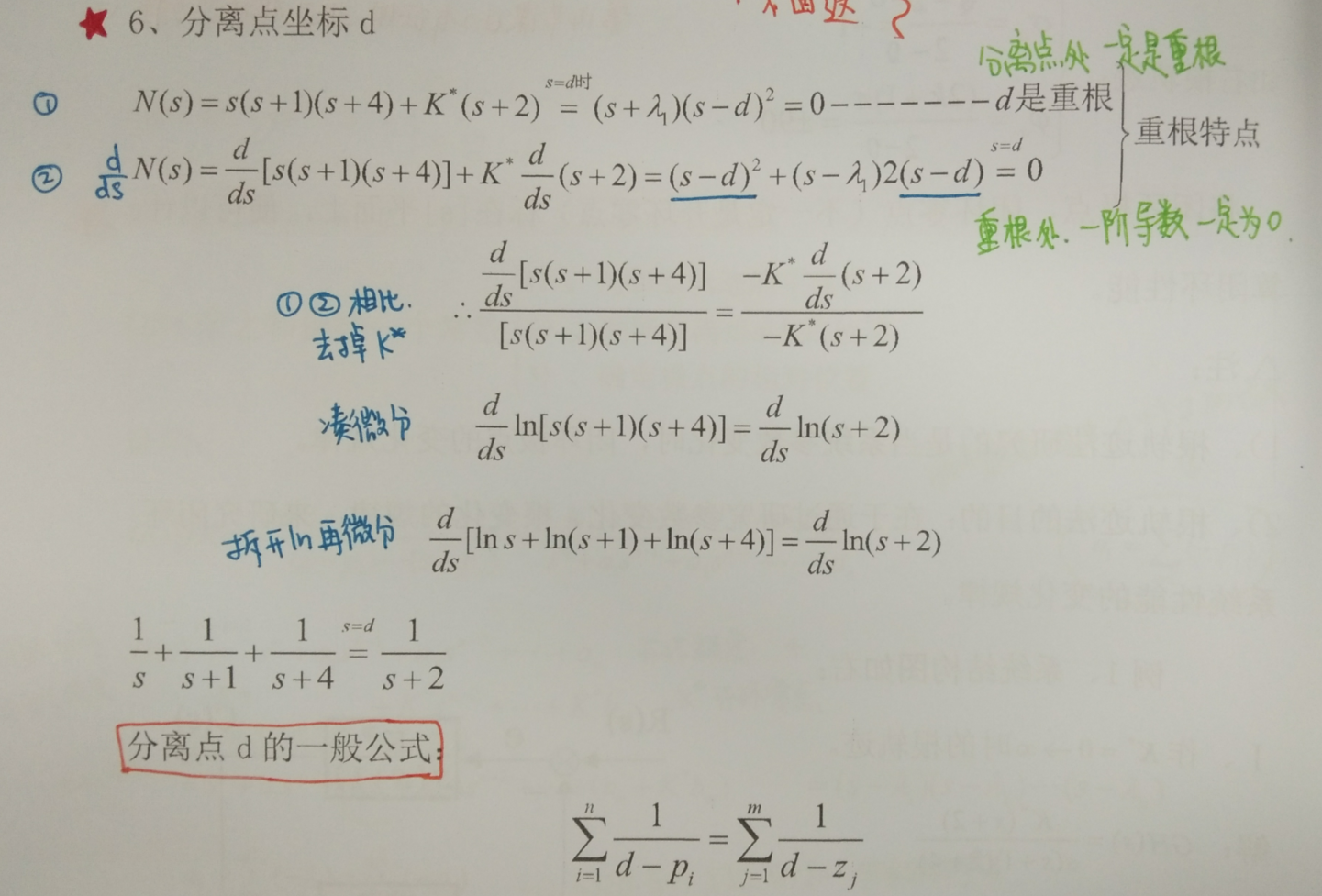
🌟分离点坐标公式
计算分离点坐标方法有挺多,详见 分离点计算
🌟与虚轴的交点
- 带着根轨迹增益列劳斯表,让第一列临界稳定,即出现 0 , 即有出现与虚轴交点时 K 的值
- \(s=j\omega\) 位于根轨迹上,是根轨迹方程的根/特征根,则代入跟轨迹方程 \(D(s)=0\).
等式要想成立,左边的实部和虚部都要为 0, 计算得到 \(\omega\)
🌟出射角,入射角
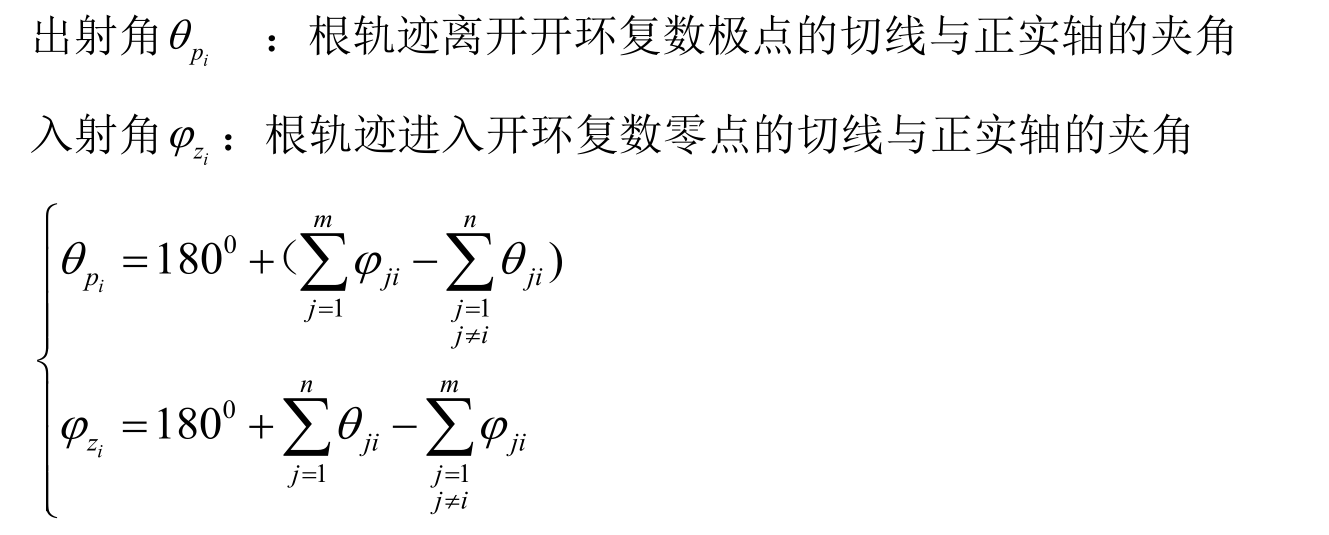
这个公式不用记,就理解为:出射/入射时,极点可视为与对应的极点/零点重合,在此基础上列相角条件即可.
还比如存在 3 重闭环极点,从此出射,在相角条件里就列上 \(3\theta\) 计算出射角
另外,相角条件的角度是从开环零极点指向根轨迹上的极点,在算入射角时要转换为根轨迹上极点指向开环零点.
2.2 补充说明¶
用以上法则,只能概略的画出根轨迹来(误差 20%)
开环零极点的位置有时略有变化,根轨迹可能有显著的不同,要依据情况具体分析而确定(关键在于分离点的确定)
3 根轨迹分析系统性能¶
- 绘制根轨迹
- 由根轨迹获得闭环传递函数
- 保留主导极点,利用零点极点法分析系统性能 (其实还是用的时域分析方法)
> 高阶系统说阻尼比,都是指的主导共轭极点
开环稳定性与闭环稳定性
开环稳定:开环极点都在左半平面
闭环稳定:闭环极点都在左半平面
开环稳定和闭环稳定没有关系,从根轨迹就可以理解.
- 负反馈未必能改善系统性能,只是提供了更多改善的机会 (根轨迹总体要往左偏)
- 正反馈增加系统发散的可能,但也有可能改善系统稳定性 (根轨迹总体往右偏)
3.1 计算分离点 ¶
核心原理:分离点处一定是根轨迹方程的重根 → 重根处一阶导数一定为 0
- 常规的 \(\sum \frac 1{d-p_i}=\sum \frac 1{d-z_j}\)...
需要注意,分子是一,分母是单根(复数根要拆开写), 一边是零点,一边是极点. 没有零点写 0.
-
\(M'N-N'M=0\) 感觉也挺方便的.
(其实来源就是 \(1+G(s)\) 求导,就是 \(G'(s)=\frac{M'N-N'M}{N^2}\)) -
也可以直接 \(\frac{d}{ds}D(s)=0\)
Note
第一个方法是讲的最多的方法,虽然形式上比较麻烦,但是我想它的优势在于,方便用计算器进行试根.
用卡西欧计算器输入方程,根据根轨迹图像看一下分离点在哪个区间,然后设定初始值,就能试出来根.
我觉得其他方法则更适合手算,因为没有分数形式. 如果你手算第一个方法,会发现形式上会和第二个相同.
由于根轨迹特指 \(K^*=0\to \infty\) 的情况,因此计算出分离点后,要进行验证:
- 根据图像,明显不在根轨迹上就舍弃
- 由模值条件算出对应的\(K^*\), 为负数就舍弃
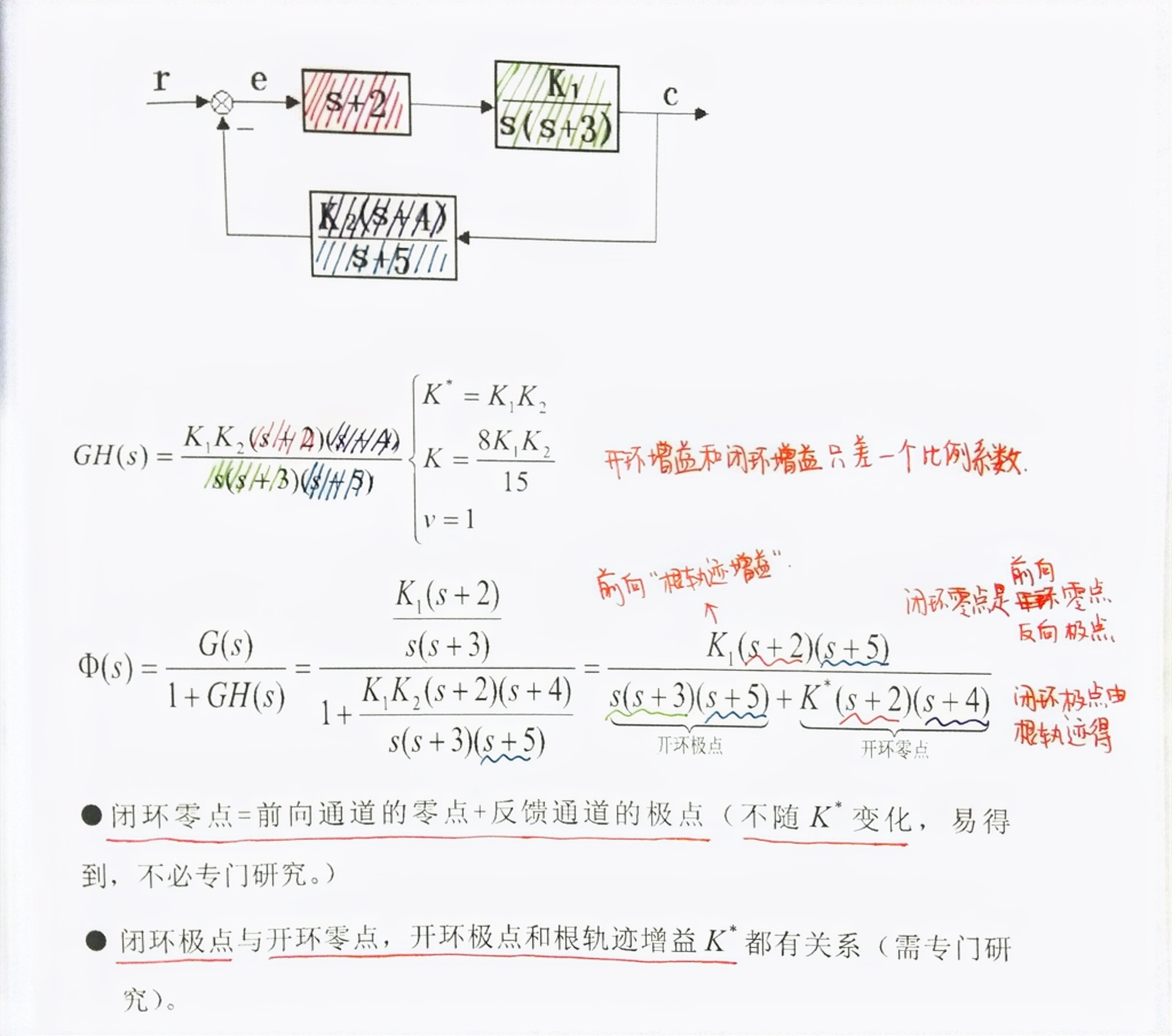
3.2 由根轨迹获得闭环传递函数¶
- 闭环零点:前向通道零点,反馈通道极点
- 闭环极点:对应 \(K^*\) 时,根轨迹上点的位置
-
闭环增益:这个比较 tricky, 如果情况比较复杂就现推吧...
反正记好特征方程的样子,如果 n>m 的化,特征方程是首一式 \(s^n+...\), 这样根据根轨迹读出极点,直接连乘就放到分母就好了.
如果 n=m, 特征方程 \(N+KM\to (1+K)s^n+...\) 所以... (详细可以看 PPT (应该只适用于单位负反馈
总而言之,零极点是比较好看,闭环增益需要小心,没有特别方便的规律. 如果系统结构图已经给出来了,不妨手动去化,不会出错.
3.2.1 求闭环极点的方法¶
例如有时候会需要设计一个特定阻尼比的系统,这说明固定了角度,求射线和根轨迹的交点
- 根据特殊的几何关系(如根轨迹是圆,用相切,直角)
- 代数方法:根之和(与根之积), 适用于只有一(两)个极点未知的情况
- 其他关系式,例如阻尼比已知,则设极点,代入相角条件.
3.3 开环传递函数存在零极点对消¶
- 画根轨迹时正常画(这个根轨迹阶数肯定是变低了对消次数的)
- 根轨迹只反映了随\(K^*\)变化的极点,同时还会存在不随之变化的极点
- 分析系统性能时,手动算一下闭环传递函数,找全所有闭环极点再进行分析
3.4 PID 对根轨迹影响分析¶
-
P: 影响增益,如果比例部分为 1, 那么就不影响开环增益. 其他 PID 也是同样的.
-
PD: 引入一个开环(实数)零点
- 系统型别不变,P=1 时增益不变 → 稳态精度不变
- 开环零点使根轨迹左移 → 极点左移 → 调节时间减小,超调量可以接受
-
PI: 引入一个开环零点,同时引入一个积分环节 (\(s=0\)的开环极点)
- 系统型别加 1, 稳态精度极大提高
- 根轨迹新增一个从原点出发的极点,主导极点更有可能靠近虚轴 (应该可以这样理解吧...) → 调节时间变长,超调量大
-
PID: 引入两个开环零点,一个积分环节
此处可参考 第 3 章 线性系统的时域分析法.md 中对于附加开环零极点影响的总结.
4 广义根轨迹法¶
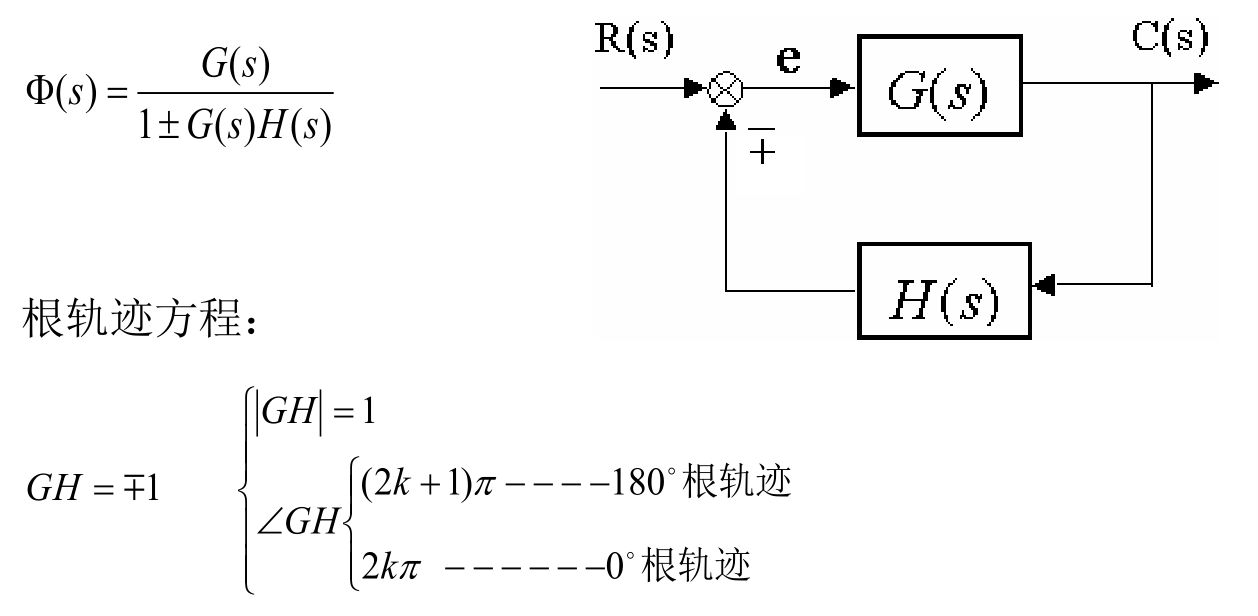
闭环传递函数 \(\Phi(s)=\frac{G(s)}{1+G(s)H(s)}\) → 通过整理分母获得根轨迹方程 \(GH= -1\)
如果从一个抽象的数学角度去理解,根轨迹实质上就是一个固定形式的方程 \(K^*D(s) = -1\) , 根据 \(K^*\) 的变化映射出一条曲线.
- 如果\(K^*\)在一般位置,整理成根轨迹要求的标准形式 → 参数根轨迹
- 如果\(K^*\)为负 → 零度根轨迹
4.1 参数根轨迹¶
根轨迹是根据闭环传函的分母也即特征方程\(D(s)=0\)画出来的.
所以只要 \(D(s)=0\) 相同,闭环传函的极点也就相同. 这就是参数根轨迹中根据 \(G^*(s)\) 的依据.
\(G^*(s)\) 对应的闭环传递函数与原始的闭环传递函数,极点相同,零点不同. 所以只需要用它画根轨迹来获得闭环极点,不要用它分析性质.
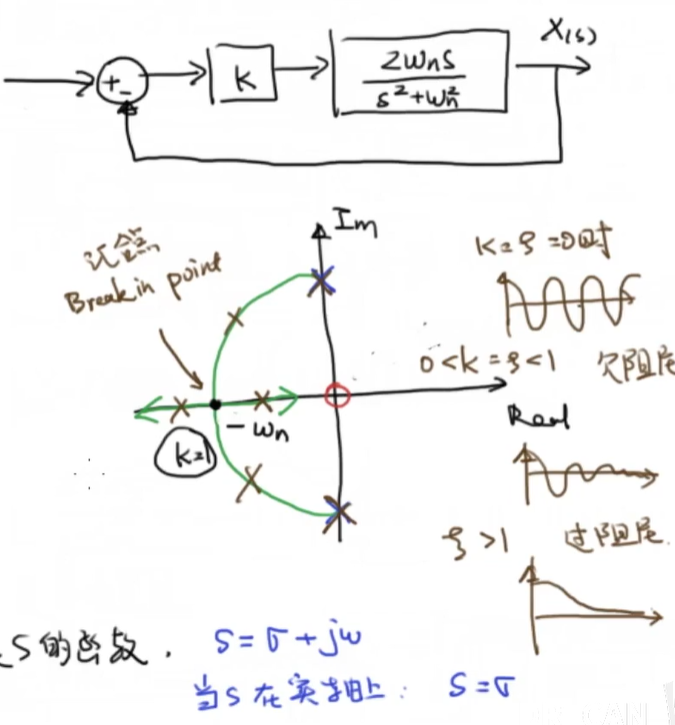
用根轨迹法分析二阶系统阻尼比
4.2 零度根轨迹¶
实质上正反馈时的根轨迹
零度根轨迹只是相位变了,画根轨迹时,涉及到\((2k+1)\pi\)的地方都换成\(2k\pi\)即可。
实质上的正反馈
一般我们说的正负反馈只是说在反馈口的符号是正还是负,但是影响正负符号的还有未知参数根轨迹增益!
另外参数根轨迹里面的 \(G^*\) 有可能就变成了零度根轨迹.
根轨迹只关心最终跟轨迹方程是什么样的,如果 \(GH=+ 1\), 就判断实质上是正反馈。
我们一般默认参数都是正的,\(K^*=0\to\infty\), 如果化简发现为 \(GH=1\), 说明系统是正反馈.
另外,就算系统是负反馈,但是如果 \(K^*<0\) 那依旧化简为 \(GH=1\), 实质上是正反馈.
进一步理解:对于负反馈系统
- \(K^*=0\to\infty\), 负反馈,180°根轨迹
- \(K^*=0\to-\infty\), 实质正反馈,0°根轨迹
若令 \(K^*=-\infty\to0\to\infty\), 则两种情况被统一起来,抽象成为一般的数学讨论. 画出包含全部取值的根轨迹.
你会发现零点的选择只是意味着起始点不同,180°根轨迹从起始点往正方向截取,0°根轨迹往负方向截取. 如果你想根据根轨迹确定最佳参数,也许最好正负两段都考虑进去.
截取 0°根轨迹的部分后,箭头方向要取反,因为是往参数减小的方向.
5 上课笔记¶
EXAM NOTIFICATION
英语单词
根轨迹 root locus
一道大题 15 分画根轨迹,
不考出射角入射角,不考初始共轭极点,不考广义根轨迹.
有重极点时需要画多个叉号。
- 求分离点汇合点先求出分离点,然后代入特征方程求 K, 或者使用模为 1 的条件求 K, 如果大于 0 才是分离点.
- 写出分离点/汇合点的传递函数:根据根轨迹求闭环传递函数: 见笔记相关内容
- 写出没有超调量 K 的取值范围(根轨迹处于实轴上的部分/不存在共轭极点)画出根轨迹后观察得到实轴上的部分,然后找到 K 小于分离点 K, 大于汇合点 K
- 求与虚轴交点 (与虚轴的交点设为\(j\omega\), 特征方程中 s 换成\(j\omega\), 求出对应的 K 和\(\omega\))
- 确定稳定时 K 的范围(复半平面左侧部分), 即 K<与虚轴交点处的 K
(稳定时 K 的范围求不出可以使用劳斯判据获得结论)
- 确定稳定时 K 的范围(复半平面左侧部分), 即 K<与虚轴交点处的 K
根轨迹方程原理:
开环传函\(G_0(s)=G(s)H(s)=\frac{K^*\prod_{j=1}^{m}(s-z_j)}{\prod_{i=1}^{n}(s-p_i)}\)
理想情况下:
根轨迹方程\(1+G(s)H(s)=0\)
即\(1+\frac{K^*\prod_{j=1}^{m}(s-z_j)}{\prod_{i=1}^{n}(s-p_i)}=0\)
\(\Phi(s)=\frac{G(s)}{1+G(s)H(s)}=\frac{G(s)\prod_{i=1}^{n}(s-p_i)}{\prod_{i=1}^{n}(s-p_i)+K^*\prod_{j=1}^{m}(s-z_j)}\)
分子肯定没有零点,是多项式,分子此时都是极点。
这解释了为什么用根轨迹方程算出的 s 就是闭环传函的极点。
同时也能够理解为什么根轨迹(\(K=0\to\infty\))是从开环传函极点出发,到达开环传函零点(无穷远点)。
当我们要研究的变化的参数 K 不是开环传函的开环增益时,K 在其他位置,就需要化成根轨迹方程的形式。
此时\(1+K^*G_0'(s)\),其中\(G_0'\)是等效开环传递函数。
化成这种统一的形式,我们才可以用统一的规则来画根轨迹图。
根轨迹的基本特性/规则:
为什么根轨迹对称于实轴?
因为极点要么是实数要么是复数,复数一定是共轭的.
为什么复数一定是共轭的,因为出现复数是因为\(as^2+bs+c=0\)的\(\frac{-b\pm\sqrt{b^2-4ac}}{2a}\)会产生共轭根.
三次的一定可以化成\((s-\varphi)(as^2+bs+c)\)其中\(\varphi\)不可能是复数,因为如果是复数的话,s 的系数就会出现复数(似乎这里要设定我们的 s 多项式的系数一定是实数).
更高次项同理。
拉普拉斯变换和 z 变换的零极点问题
x(t)或x[n]是实信号,其零极点就关于实轴对称,确切说是共轭零极点
为什么开环传递函数极点数 n 大于零点数 m?
如何绘制零点数多于极点数的根轨迹 - 知乎
零点数对应系统输出部分的阶数,在微分方程中对应于输出那部分求导的最高次数。导数项意味着变化趋势(例如加速度对于速度)。如果输出的阶数更高,整个方程就可以理解为未来输出的变化对当前输入有影响,但显然输出必须在输入之后才能产生。所以才说零点多于极点是违背因果律的。
零点大于极点是非因果系统,实际上不存在。
书上似乎有证明?
根轨迹绘制法则,详见 PPT
n 阶无差系统的相关题型:
n 阶无差系统是,输入信号最高到 n 阶时,可以保证稳态误差为 0.
严格依照求稳态误差的那个公式,要保证其趋向于 0,说明分子阶数得比分子高!因此,需要让相关参数为 0,才能取掉不应该出现的分子的低阶项/分母的高阶项。
输入信号\(\frac{1}{s},\frac{1}{s^2},\frac{1}{s^3}\)
\(1(t),t,t^2/2\)
相角条件是确定 s 平面根轨迹的充要条件
根轨迹法的应用:
- 通过轨迹可以判断何时系统稳定:求根轨迹与虚轴交点以及对应的开环增益 K
- 系统何时欠阻尼(根轨迹处于二三象限),系统何时临界阻尼(极点位于分离/汇合点)
- 极点离虚轴越近,稳定性越差。
参考时域分析法中,振荡环节极点位置,阻尼越小,越靠近虚轴,阻尼为 0 时,极点在虚轴上,阻尼小于 0 时,极点在虚轴右侧.
第 3 章提到过增加极点,阻尼增大,越靠近虚轴,作用越明显
有兴趣可以进一步研究. - 对于单位负反馈系统,闭环零点就是开环零点,闭环极点由根轨迹表示(根轨迹是由开环传函求的,但是求出来的是特征方程的根,是闭环极点). 闭环 K 就是开环 K
\(\frac{G}{1+G}=\frac{\frac{KN}{D}}{1+\frac{KN}{D}}=\frac{KN}{D+KN}\)
通过根轨迹确定(指定位置的)开环增益, 对于稳定系统,开环增益与稳态误差有简单的倒数关系.
给定要求的阻尼比\(\xi\), 寻找符合要求的开环增益:
\(cos\beta=\xi\), 找到交点即对应的极点.
极点满足\(s=-\xi\omega_n+j\omega_n\sqrt{1-\xi^2}\), 其中有\(\omega_n\)未知.
通过交点处极点满足的相角条件列公式可以获得 s 的准确数值.(那道题刚好有一个极点/零点为(0,0))
通过幅值条件可以获得对应的 K(其实就是代入特征方程求 K 值)
求根轨迹思路以及步骤简要总结:
根据我做了几道题以及看了作业题答案后的个人偏好.
根轨迹可以求的其实只有三个:
- 起始点/(极少情况有起始渐近线), 出射角
- 终止点/终止渐近线,入射角
- 分离点,分离角
当然还有其他的,比如可以确定实轴上的根轨迹,右侧为奇数个零极点的部分是根轨迹.
不过我在做题的时候只是把这个当做验证手段,因为计算了出射角入射角,大致形状以及确定了.
因此做题的时候可以依照这个顺序分别进行计算。
在找渐近线时,如果\(n-m=1\)就不用列式求与实轴交点了.
在计算出射角和入射角的时候,可以统一采用\(\sum^i\angle(s-z_i)-\sum^j\angle(s-p_j)=(2k+1)\pi\)计算(理解了原理后很好记).
假如说算极点\(p_i\)处的出射点,就把\(\angle(s-p_i)\)换成\(\theta_{p_i}\), 其他地方,将 s 换成\(p_i\). 因为这就是一个逼近. 求得的\(\theta\)是\(p_i\to s\), 刚好就是起始角度.
需要注意的是,求入射角时,同样的方法求出的\(\theta\)是\(z_i\to s\), 但是我们需要的入射角是\(s\to z_i\), 因此需要将求得的\(\theta\)取相反数.
另外在计算\(\angle x+jy\)时,有一个需要注意的地方,就是不可以直接使用\(\arctan{\frac{y}{x}}\)
因为\(\arctan\)适用于实际角度为锐角,当实际角度\(\theta>90^\circ \,or\, \theta<-90^\circ\)时,计算出来的就不对了. 因此需要通过一定的转化.
比如说:\(\angle-1+j\sqrt2\)是一个钝角.
计算时采用\(180^\circ-\arctan\frac{\sqrt{2}}{1}\)(注意这里分母是 1, 不是-1 噢)
还有在画根轨迹的时候需要积累一定的经验,比如说有的时候轨迹就是绕零点的圆,而不是其他形状.
在计算分离点的时候,需要对计算出来的结果进行判断(此时 K 是否大于 0/是否在 K>0 画出来的根轨迹上,才符合条件).
除特殊情况外,分离点是实数,可以直接通过判断分离点是否在实轴根轨迹上确定. 因为右侧零极点个数为奇数的才是根轨迹.
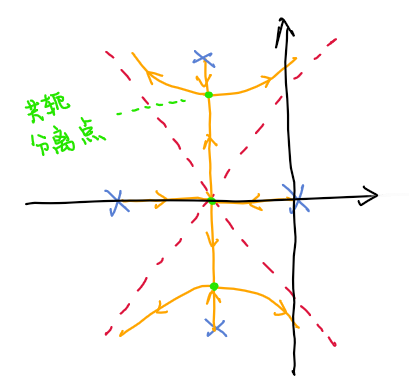
特殊情况下比如说下图,这种情况下通过根轨迹一画就知道,因为两个根轨迹直线相向而行,必定会在某处相交,其他情况基本可以判断舍去(吧).
考试不会对分离点考察太难,三阶的话一般可以猜到一个通过长除法化成二阶,再高就只能编程计算了.
闭环零极点分布对系统的影响
- 对时间响应/阶跃响应
- 主导极点决定系统主要的动态特性
- 闭环偶极子互相抵消
如果\(m\neq n\), 就会存在渐近线,参考\(\theta=\frac{(2k+1)\pi}{n-m}\)
| 增加开环零极点 | \(n---m\) | \(\theta\) | 稳定性 | 解释 |
|---|---|---|---|---|
| 增加极点 | ↑ | ↓ | 不利 | 渐近线右偏,到达正半平面 |
| 增加零点 | ↓ | ↑ | 有利 | 渐近线左偏 |
K>0 时系统稳定,称为结构稳定(根轨迹全部在左半平面)
ATTENTION: 增加零极点一般都是默认增加 S 左半平面的.
增加开环右零点,根据奈氏判据,是会破坏稳定性的.
增加开环右极点,也会导致根轨迹有一部分在右半平面.
考试不考广义根轨迹,不考出射角/入射角(因为根轨迹频率会考)