CH4. 线性系统综合¶
1 状态反馈与输出反馈¶
- 状态反馈 \(u=w-KX\)
- 输出反馈 \(u=w-HY\)
两种反馈都可以改变极点,阶数不变,A 变了,但是输出反馈能做到的,状态反馈也能做到 (\(K=HC\)), 反之则不亦然. 状态反馈可以任意配置(可控的)极点. (系统不完全能控时,只能任意配置可控的 r 个极点)
状态反馈有可能改变系统的能观性。
| 反馈类型 | 能控性 | 能观性 |
|---|---|---|
| 状态反馈 | 不变 | 可能变(零极点相消) |
| 输出反馈 | 不变 | 不变 |
2 极点配置控制器¶
状态空间中系统的镇定问题,即让系统渐近稳定
\(\sum(A,B,C)\leftrightarrow \sum(A-BK,B,C)\) , \(A-BK\) 极点都在 s 左半平面
2.1 能控性与极点配置¶
- 系统完全能控,则状态反馈能镇定,极点可以任意配置
- 系统不完全能控,则当不可控极点位于左半平面时,状态反馈能镇定.
不可控极点不能被修改,其余极点可以被修改.
2.2 K 的计算¶
- 根据时域/频域性能指标,用经典控制理论确定期望极点位置,然后就确定了期望的特征方程,进而就确定了对应的 K
- LQR 控制器,最优化代价函数的方法
对于第一种方法,步骤如下:
- 判断完全能控
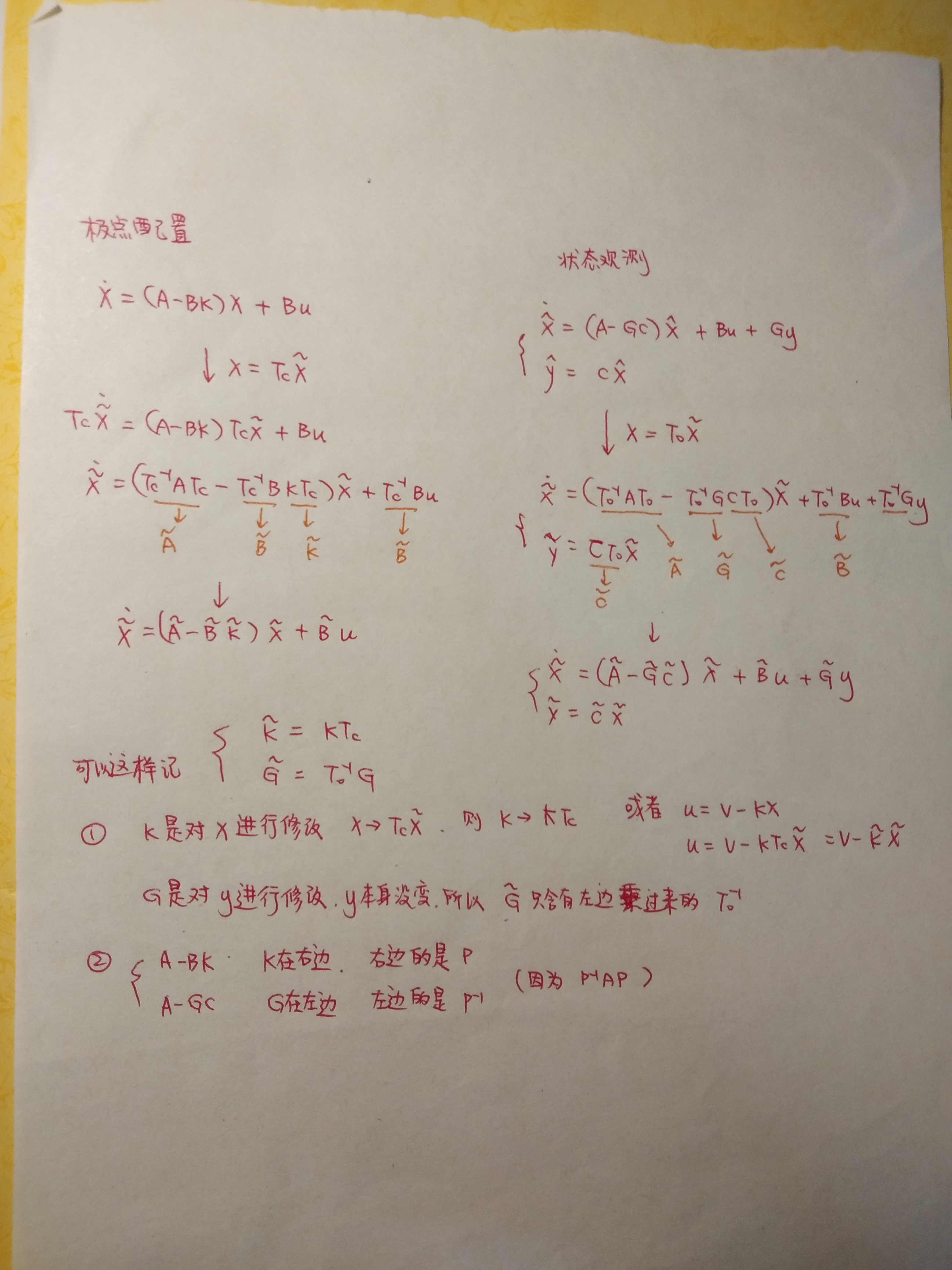
- 化成能控标准型 \(X=T\hat X\)
- 根据能控标准型写出特征多项式 (A 最后一行)
- 根据期望极点写出期望特征多项式
- \(\hat K=p^*-p\)
-
\(K=\hat KT^{-1}\)
对原系统:\(u=w-KX\)
经过坐标变换后,\(u=w-KT\hat X\)
说明 \(\hat K=KT\).
当然,如果系统阶次比较低,根据特征多项式不变的特性(化成标准型也只是为了方便看出特征多项式的系数), 可以直接 \(|sI-(A-BK)|=\text{期望特征多项式}\) , 对应系数相等求出 \(k_i\)
对于不完全能控的系统,可以根据能控性分解,对能控部分(前 r 行)控制;也可以使用待定系数法计算低阶系统的 K(后面有总结)
3 状态观测器¶
符号表达有的是 L, 有的是 G
龙伯格观测器
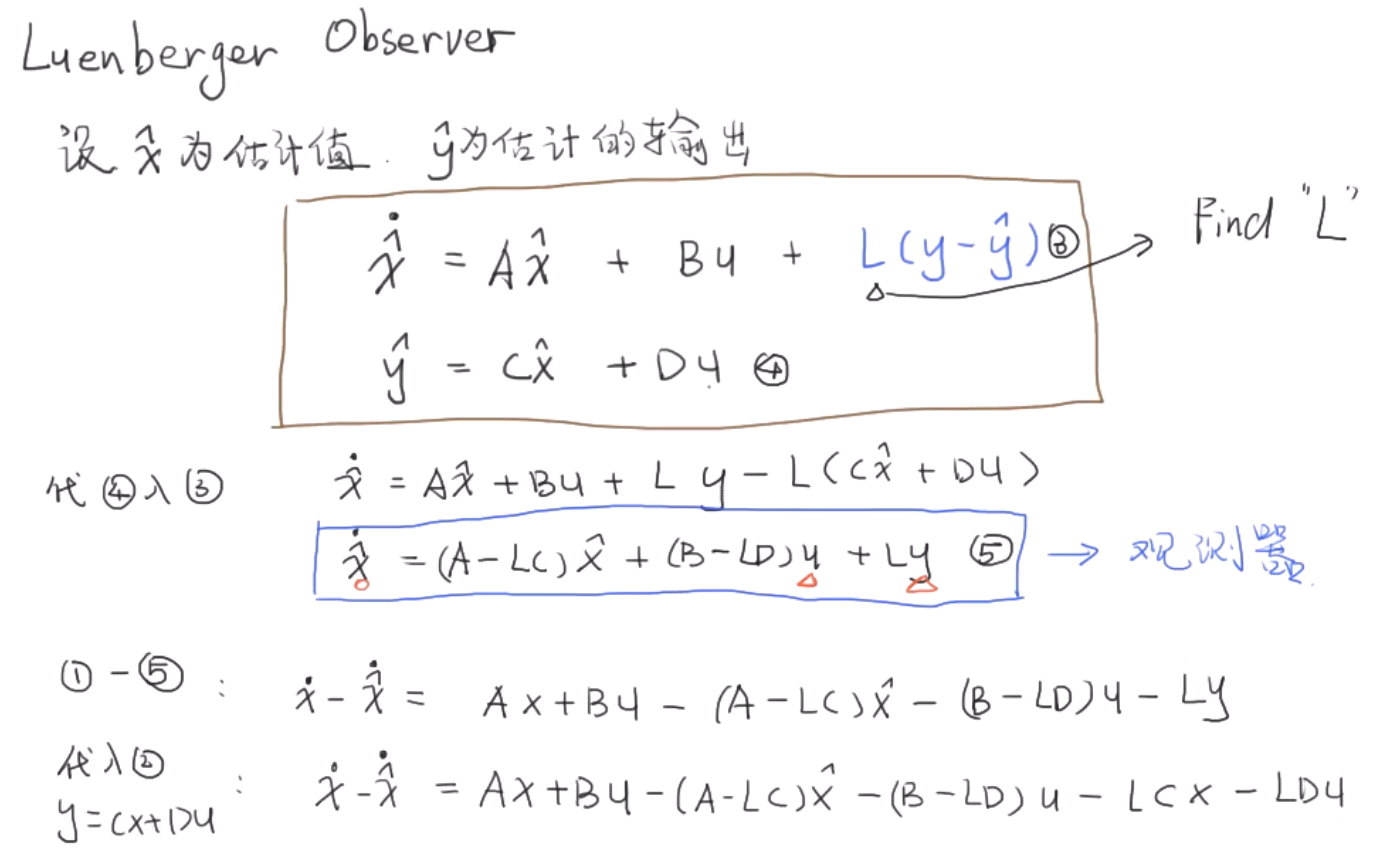
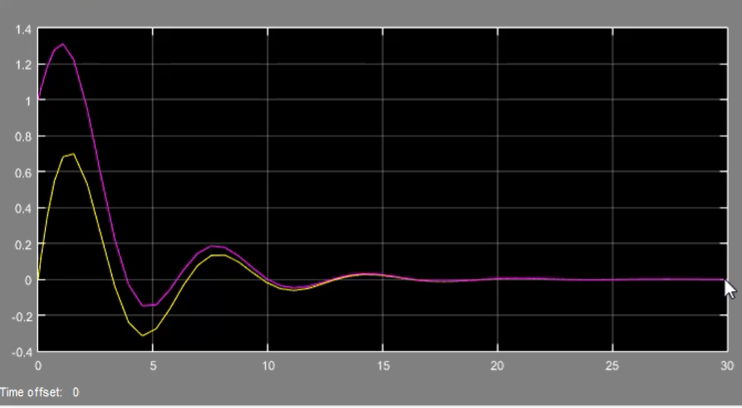
整理可得 \(\dot e=\dot X-\dot {\hat X}=(A-LC)(X-\hat X)\).
建立观测器,实际上是建立一个新的反馈系统,当\(A-LC\) 特征值具有负实部时,误差\(e\)趋于 0
3.1 设计步骤¶
系统完全能观,或者不能观部分渐近稳定,才能设计观测器.
-
全维观测器 \(\dot {\hat X}=(A+MC)\hat X+Bu-My\) 通过配置 M, 使这个观测器渐近稳定,则 \(\lim_{t\to\infty}(x(t)-\hat x(t))=0\)
- 判别能观性
- 化成能观标准型,可以读出特征方程系数
- 期望的观测器极点⇒ 期望特征方程系数
- 观测器 \(\hat M\)
- 原系统 \(M=T\hat M\)
-
观测器方程

-
降维观测器:这个没掌握 QWQ
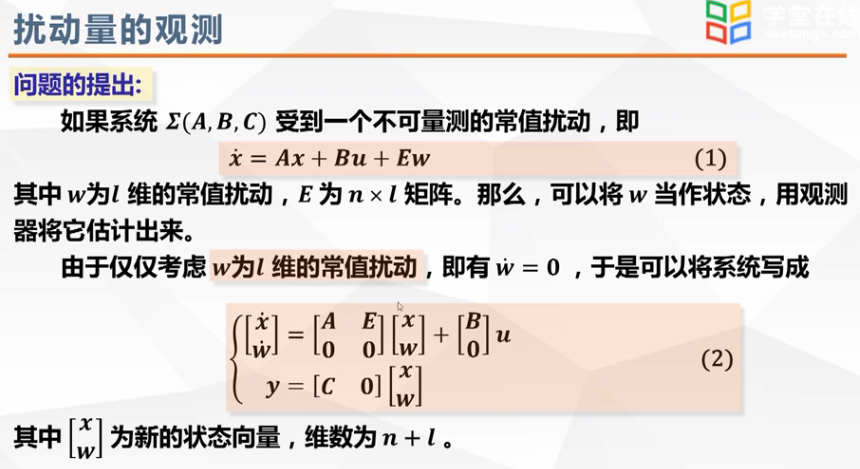
3.2 其他¶
使用全维观测器的方法观测常值扰动
4 极点配置与状态观测器配置总结¶
两者都是通过对 A 进行线性变换,从而进行极点配置. (配置 A 的特征根/特征值)
只不过极点配置是配置原系统的极点,状态观测器配置是配置观测器极点(要求响应更快)
如果已知的状态方程是标准型,那么就可以大大简化步骤,可见之前讲能控能观标准型及其互相转化的意义.
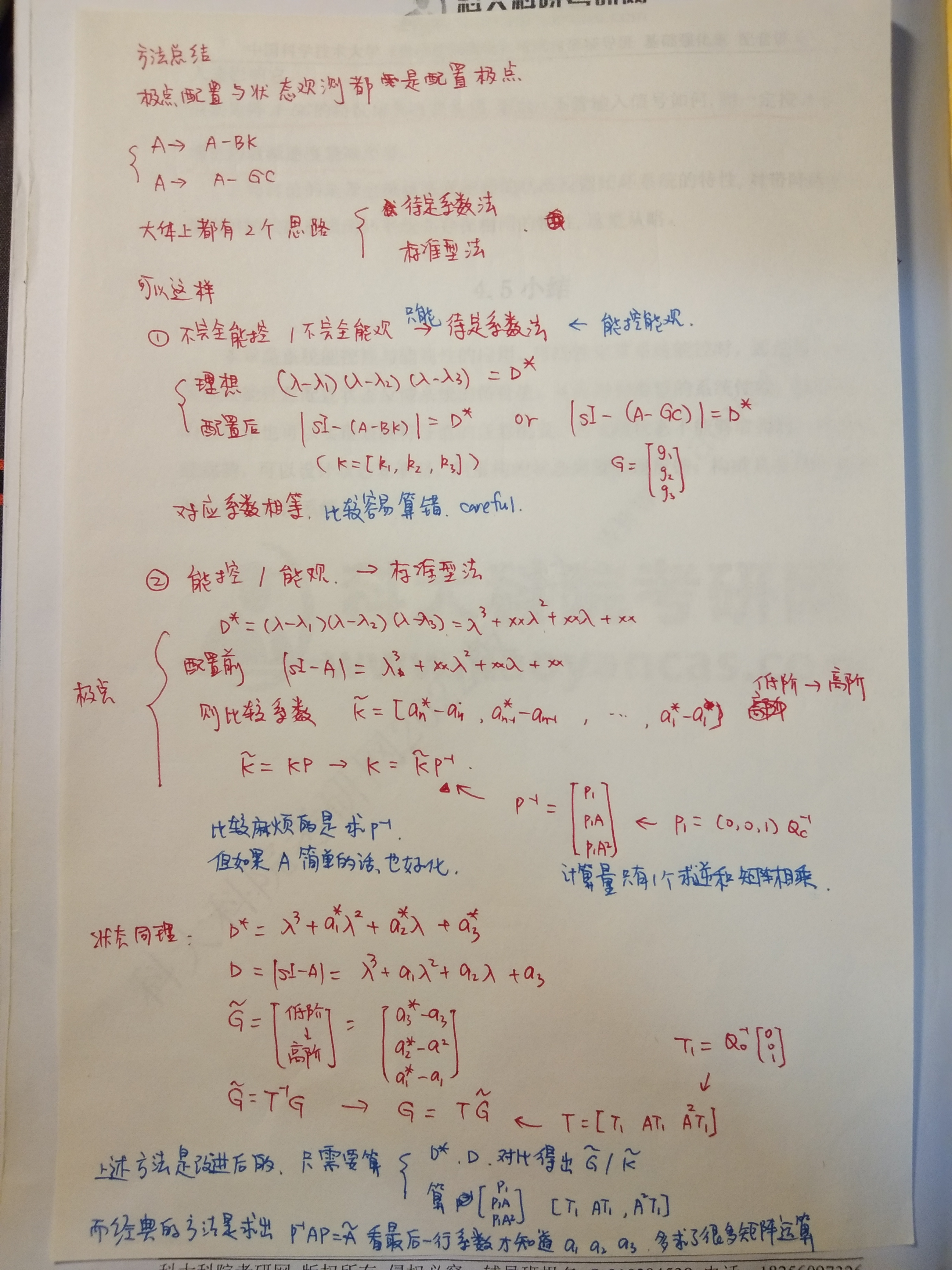
第二个方法具体解释
原始思路比较绕:一个普通系统 → 转化为标准型 → 极点配置得到标准型的控制器 \(\tilde{K}\) → 还原为原系统的控制器 \(K\)
图片笔记里提到的方法是改进过的,就是出于计算简化的目的省去了化标准型这一步,因为这一步的目的在于取得原系统特征方程的系数. 而这个系数可以由计算行列式 \(|sI-A|\) 得到.
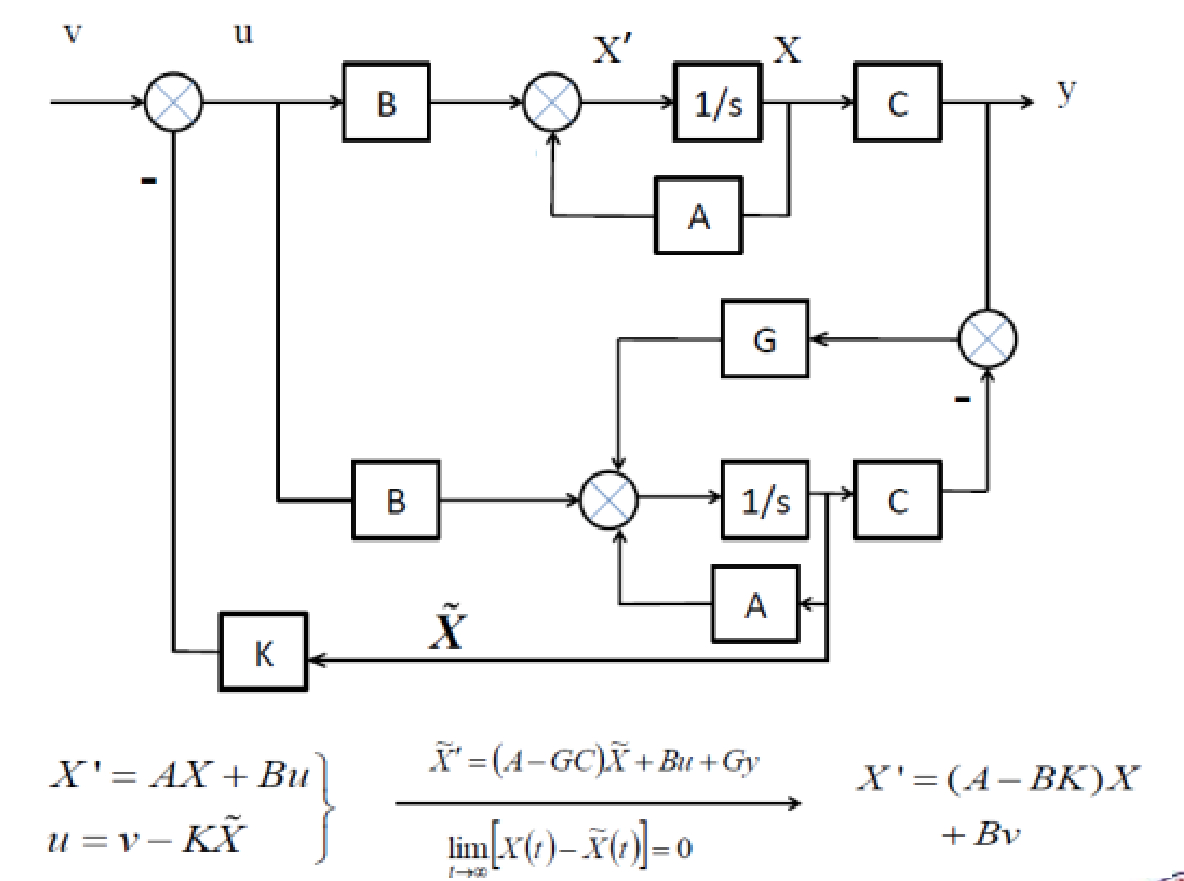
5 带状态观测器的(状态反馈)闭环控制系统¶
5.1 分离原理/分离特性 Seperation Principal¶
已知观测器
又有控制律\(u=-K\hat X\), 则有
把两部分系统合起来(具体来说就是状态 X 和状态 e 合起来), 则有带权威状态观测器的闭环控制系统的状态空间模型:
- A-BK, A-GC 共同组成了整个闭环系统的特征值
- 极点配置控制器和观测器可以分别设计
-
为了保证良好的控指标,观测器极点的实部要远小于原系统配置极点的实部
5.2 传递函数的不变性¶
添加观测器后,闭环传递函数不变. (毕竟观测器部分是不能控部分,不反应在传函上)
6 LQR 控制器¶
极点配置的时候,如何决定目标特征值?这里通过 cost Function 求解.
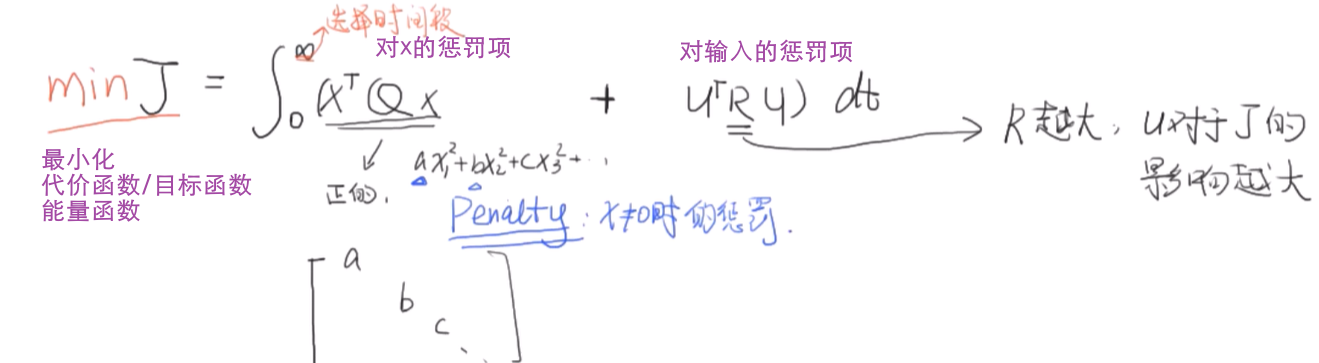
Q 比较大时,系统倾向于快速稳定,R 比较大时,系统倾向于减小能耗.
LQR 设计步骤:
- 选取合适的 Q 和 R
-
解 Riccati 方程计算出 K
MATLAB
K=lqr(A, B, Q, R)可以计算得到极点配置的 K
6.1 轨迹跟踪¶
【Advanced 控制理论】8.5_线性控制器设计_轨迹跟踪 (Follow a Desired Path)_哔哩哔哩_bilibili
看了一下大概思路是:期望值是\(x_d\) (可以是\(x_d(t)\) ), 令\(e=x_d-x\) 作为”状态变量”, 到达稳态其趋于 0,x 就趋于\(x_d\).
实际上结果就是输入添加了一个常数。