第二章 控制系统的数学模型¶
1 列微分方程¶
电感 \(u=L\frac{di}{dt}\) ⇒ \(\frac{U}{I}=sL\)
电容 \(i=C\frac{du}{dt}\)⇒ \(\frac{U}{I}=\frac{1}{sC}\)
此外,阻尼 好像是一个挺常见的概念,但是没学过. 我觉得可以理解成一个和速度成正比的阻力.
- 虎克定律:弹力 \(f=kx\)
- 粘性摩擦定律:粘性摩擦力 \(f=k\dot x\)
2 拉氏变换获得传递函数¶
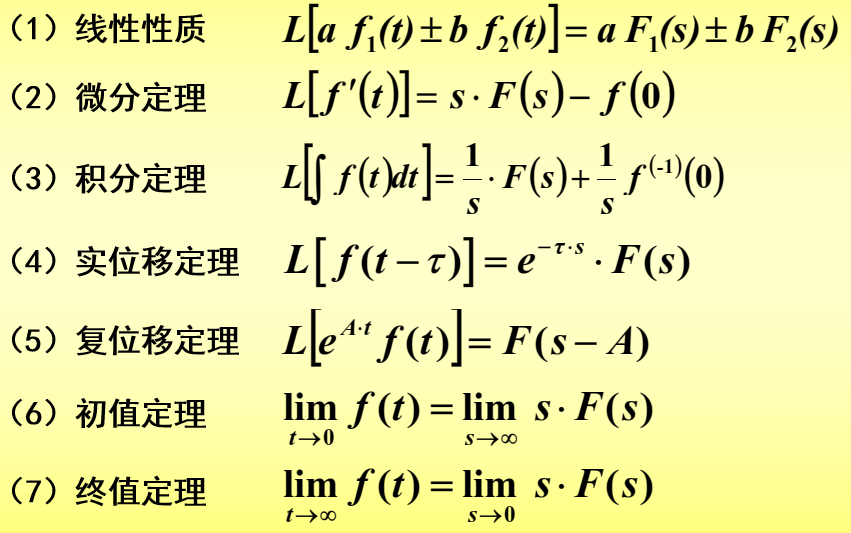
- 实位移 \(f(t-\tau)\to e^{-\tau s}F(s)\)
- 复位移 \(e^{-at}f(t)\to F(s+a)\)
- 终值定理
使用终值定理的条件是:系统的极点都在复平面的左边 (首先要有终值,求出的终值才是有意义的,否则好像是平均值?)
2.1 一个问题¶
系统的单位阶跃响应为:\(y(t)=1-e^{-2t}+2te^{-2t}\)
则系统的单位脉冲响应为:\(y(t)=4e^{-2t}-4te^{-2t}\)
而非:\(y(t)=\delta(t)+4e^{-2t}-4te^{-2t}\)
为什么 1 求导是 0 而不是\(\delta(t)\), 我觉得可以这样理解:
- 这里的 1 是全实域的常数 1, 只不过一般我们只关心 \(t>0\) 的时刻
- 如果 1 是阶跃,会标明 \(\varepsilon(t)\)
- \(G(s)\) 分母阶数等于分子阶数时,才会出现输出有阶跃/冲击 (吧)
自控里只关心 \(t>0\) 的信号,拉氏变换采用的是 "单边拉氏变换" \(F(s)=\int_0^{\infty}f(t)e^{-st}dt\)
所以这是一个比较 tricky 的点,我们总说阶跃信号的拉氏变换为 \(\frac{1}{s}\)
但是对于常数 1, 拉氏变换也会得到 \(\frac{1}{s}\)
所以 \(\frac{1}{s}\) 反变换得到的 1, 是阶跃还是常数 1?
可能这是为什么会有开头那个问题。
3 控制理论的一些基本概念¶
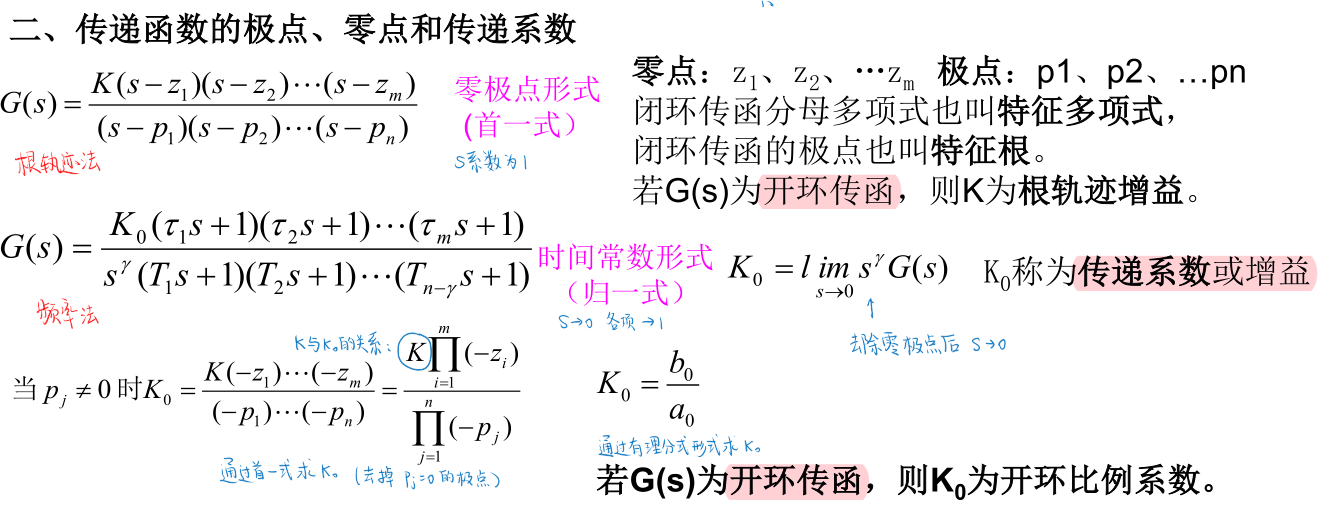
传递函数\(\Phi(s)\)的增益或者传递系数, 即放大信号的倍数,假设输入信号是一个常值(阶跃信号\(\frac1s\)), 根据中值定理,\(\lim_{s\to0}s\frac1s\Phi(s)=\lim_{s\to0}\Phi(s)\)
因此我们把传递函数里的 s 都置零后得到的常数就称为增益. (对于分母有 \(s^v\) 的,忽略掉这部分)
开环传递函数的是开环增益, 闭环传递函数的是闭环增益. 一般我们把传递函数写成尾一式、归一式,那么分子的 K 就是增益值.
另外还有一个概念,专门针对开环传递函数写成首一式时的 K, 称为根轨迹增益.
4 上课笔记¶
EXAM NOTIFICATION
考试不考结构图化简
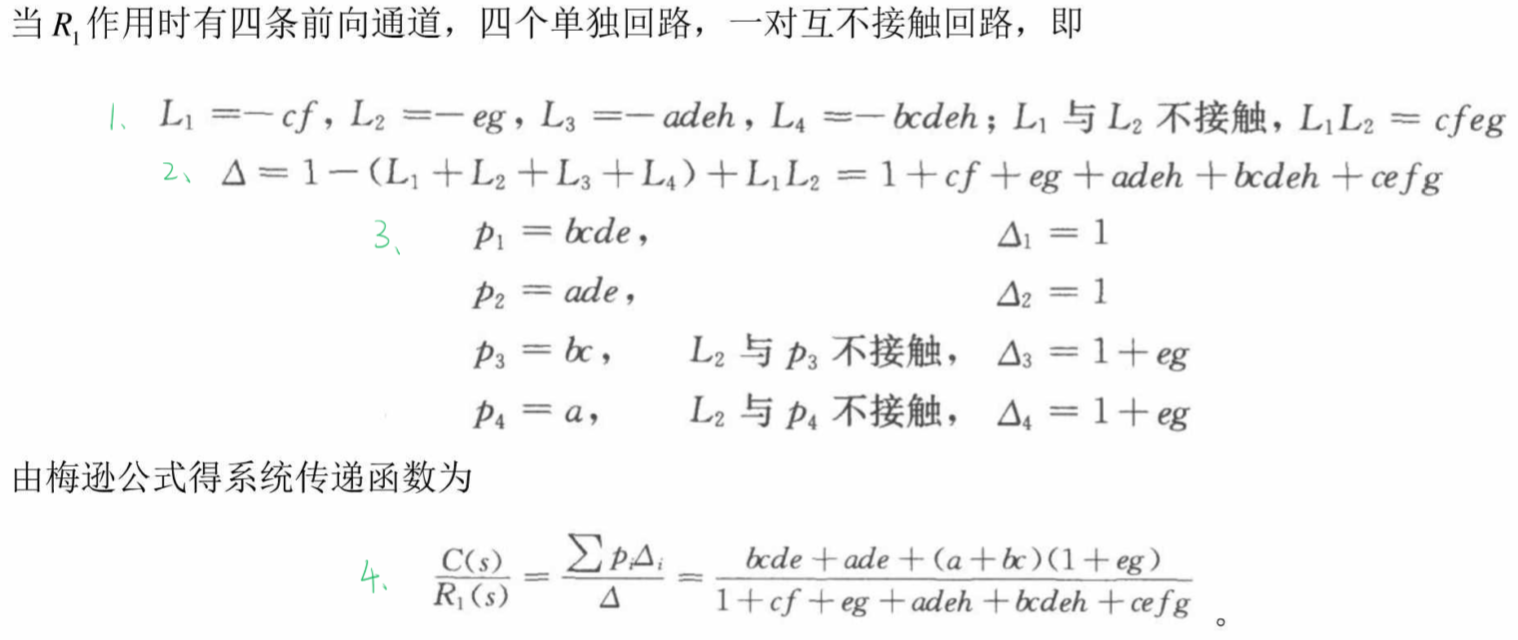
梅森增益公式一道大题 10 分,信号流图/结构图直接写梅森增益公式.(详见笔记相关内容.)
三种传递函数的形式(求开环增益:去掉积分环节,s 趋向 0 时的常数)
- 一般式
- 零极点式/首一式:根轨迹增益
- 时间常数式:频率特性,增益
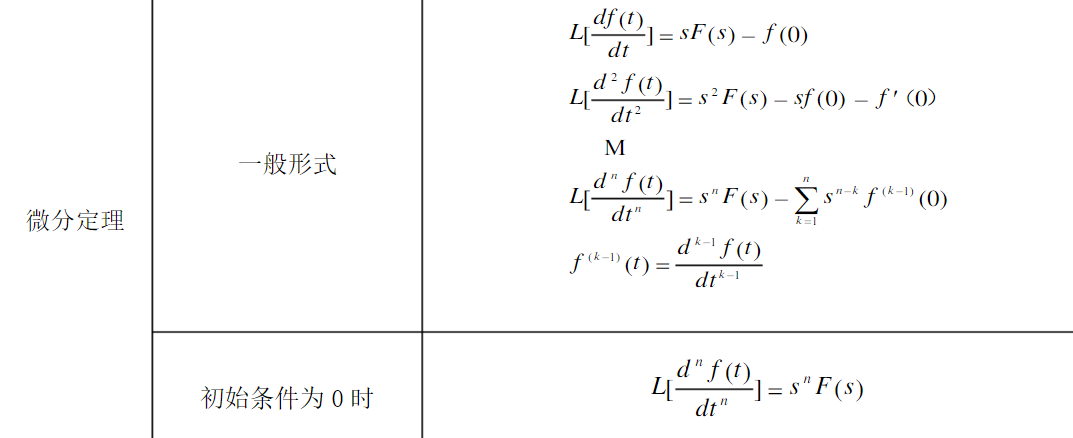
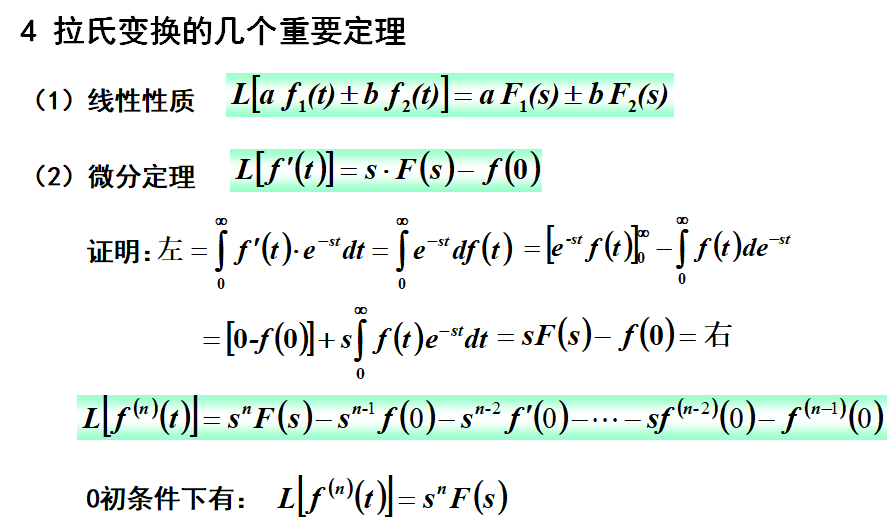
微分方程与传递函数互相推导.
(n 阶微分就是 sn, 唯一需要注意的可能就是初始值不为零时,由微分方程求传递函数,最下面有微分定理\(sF(s)-f(0)\))
英语单词
零点 zero
极点 pole
特征根 characteristic root
特征方程 characteristic equation
传递函数 transfer function
频率特性 frequency characteristic
系统建模的方法
- 解析法:了解系统的原理,列出微分方程
- 实验法:施加测试信号,利用数学模型逼近
要注意传递函数的负载效应问题。要在系统正常工作的情况下建立系统模型。
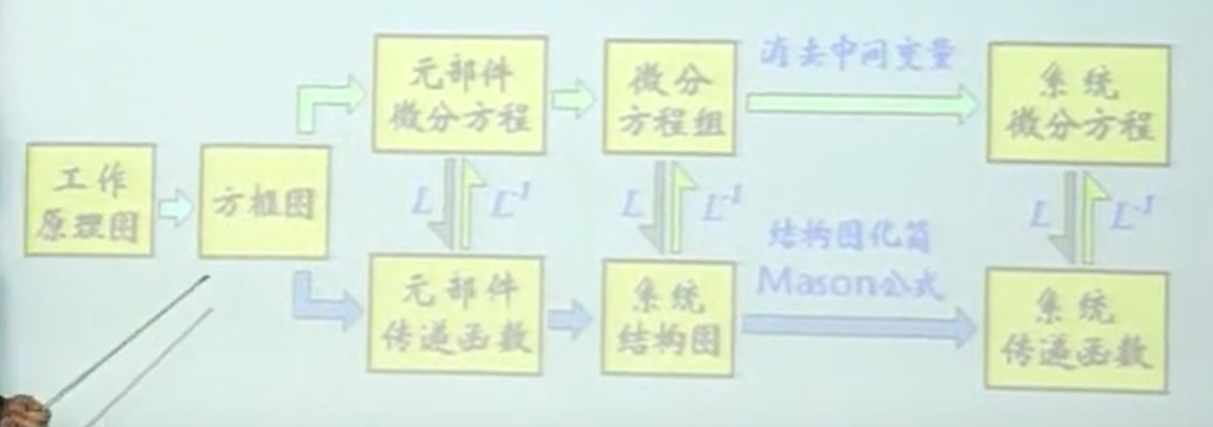
图片想说明的意思是,我们可以先画出系统的原理图/工作框图,弄清楚各个部分之间的关系.
然后有两条路径,第一条是列元件的微分方程组,求解之后拉氏变换为传递函数.
第二条是根据元部件传递函数,列出系统框图,根据梅森增益公式求出系统传递函数(显然应该使用这种方法)
数学模型的类别:
- 时域:
- 微分方程
- 差分方程
- 状态方程
- 复数域
- 传递函数
- 结构图
- 频域
- 频率特性
传递函数
- 复变量 s 的有理真分式函数,\(m\le n\), 分母阶数不大于分子阶数,且所有系数均为实数.
- 只取决于系统本身的结构与参数,与输入量无关.
- 可以与微分方程互相转化。零初始条件下,只需要微分方程的算符\(\frac{d}{dt}\)与 s 转换,就可以了.
- 反变换是冲激响应
传递函数的局限性:
只能表示线性定常系统
适合描述单输入单输出
原则上不反映非零初始条件时系统响应的全部信息
注意,后面讲的所有内容都有一个前提:系统是线性定常系统。
微分方程的形式需要满足:
- 每一项都是输入/输出的本身或者 n 阶导数(一阶),没有(不同阶数的)交叉乘积项,没有(同一阶数的)平方(二阶)等高次项,也没有常数(零阶)。
- 每一项的系数恒定
世界上没有线性系统,只有泰勒级数一阶展开。
非线性微分方程的线性化:切线法/小偏差法
(泰勒级数一阶展开,泰勒级数展开略去 2 阶及以上)
$$
f(x)-f(x_0)=(\frac{df(x)}{dx})_{x_0}(x-x_0)
$$
即线性化方程为\(y=(\frac{df(x)}{dx})_{x_0}x\).
运动的模态/线性微分方程解的类型
线性微分方程的解=特解(输入决定)+通解(系统本身决定)
通解形式:每个微分方程特征根对应一种模态/振型,通解是所有特征根对应模态的和。
- 实数单根 \(e^{\lambda_i t}\)
- 实数重根 \(t^{n}e^{\lambda_i t}\)
- 共轭复根 \(e^{(\sigma+j\omega) t}=e^{\sigma t}(\cos(\omega t)+\sin(\omega t))\)
从拉普拉斯变换式/传递函数的角度理解(零极点):
- 极点,特征根:\(\lambda_i\)
- 模态,振型:\(e^{\lambda_it}\)
极点决定了组成输出的信号的基本类型(指数衰减,三角函数等)
零点影响了每种模态的系数\(a_k\),零点越接近虚轴,对应分量系数越大。具体原因似乎是是留数法过程中的一些影响,但是留数法怎么求我忘了,以后有时间可以分析一下。
- 开环传递函数:
- 开环传递函数是指一个开环系统(没有反馈的系统)的输出与输入之比与频率的函数关系,即系统的频率域特性。
- 也可以指一个闭环系统的反馈量输出与输入之比与频率的函数关系。\(G(s)H(s)\)(似乎使用\(G_0\)表示)
- 闭环传递函数:在负反馈闭环系统中,假设系统单输入
R(s); 单输出C(s), 前向通道传递函数G(s), 反馈为负反馈H(s)。此闭环系统的闭环传递函数为 \(\frac{G(s)}{1+G(s)H(s)}\),可以表示为\(\Phi(s)\)。
小结论:对于单位负反馈
\[ H(s)=\frac{G(s)}{1+G(s)}=\frac{\frac{a}{b}}{1+\frac{a}{b}}=\frac{a}{a+b}=\frac{1}{\frac{1}{G(s)}+1} \]根据所需要的形式快速获得结果。
系统传递结构(?)表达方式:
- 控制系统的(典型)结构图
- 有向线条代表信号
- 方框代表传递函数
- 求和点(圆圈里面是叉号)
- 信号流图
- 小圆圈代表信号
- 有向线条代表传递函数
- 利用传递函数正负代表求和
如果从结构图画信号流图,一个比较稳的方法是:把系统结构图中的框都变成线,把线都变成圈。
然后支路增益为 1 的相邻两个节点可以合并成一个节点(除了源节点和输出节点)
为什么要画信号流图?因为通过信号流图可以列写出梅森增益公式,可以方便地获取到某一个输入与某一个输出之间的传递函数。
但其实也可以直接从典型结构图直接列写梅森增益公式。
- 通过典型结构图求传递函数
- 先化简,然后照着回路列输入输出关系,消除中间变量(化简太麻烦,不推荐!可以参考课本例题
2-18,不过我感觉有一个好处就是,结构图不是很复杂的话,照着信号传递列式子,可以直接获得多输入输出的关系式)√ - 列梅森增益公式√√√
- 先化简,然后照着回路列输入输出关系,消除中间变量(化简太麻烦,不推荐!可以参考课本例题
- 通过信号流图求传递函数
- 列梅森增益公式√√
总而言之,言而总之,这部分知识点主要是通过结构图/信号流图列出输入输出关系就可以了!(简化系统函数的计算)
另外梅森增益公式求的是某一个输入与某一个输出之间的关系(换言之也是求出了指定输入的输出),如果想要求输入R(s)与扰动N(s)共同作用的输出,则采用叠加定理,将彼此分别置零后,求出的两个输出叠加在一起。
感觉这样的过程挺不错的
考试方法总结!
求梅森增益公式(包括根据结构图直接写)的方法归纳:
一个遍历方法:
define F(node,condition):
从一个点 node 出发,遇到分叉就分叉,走到终点(满足 condition, 不能再继续走下去,可能是满足了所需要求,可能是不符合梅森增益公式中路径要求不重复走走过的结点的要求)就结束 return,最终遍历出所有路径.
称之为方法F(node,condition)
- 求 L
- 找到每一个有输入的结点(混合结点)node
F(node, 组成一个闭合回路)- 求\(\Delta\)
- 求 P:
F(node, 到达目标节点)
根据结构图直接写梅森增益公式的一个难点在于,sum 不好处理,其实可以把 sum 当做一个信号/结点
其他地方则是数据线当做一个结点,方框当做一个线
传递系数的定义:(如果G(s)为开环传函)
(上面应该是除去所有的零极点\(p_j\)的连乘)
特殊地,如果如果G(s)为开环传函:
零极点形式的 K,叫做根轨迹增益;
时间常数形式的\(K_0\),叫做开环比例系数。
求开环增益/开环比例系数时,直接使 s 趋向 0 求极限即可.
求根轨迹增益时,直接使各个乘积项尾部为 1, 提出的系数合在一起就可以了.
题干中给\(c(t)=1-e^{-2t}+e^{-t},r(t)=1(t)\)
求冲激响应\(k(t)\).
有一个想法是,直接对\(c(t)\)求导,似乎就是结果。
有个陷阱是,没有说明初始状态是不是零状态!就比如说对 1 求导,可能是恒值 1(结果为 0),也可能是阶跃信号\(1(t)\)(结果为\(\delta(t)\)),或者其他。
因此,遇到这种问题,一定要使用拉氏变换求解(不受初始状态影响),\(\Phi(s)=\frac{C(s)}{R(s)}\),然后反变换获得冲激响应。
拉氏变换
\(F(s)=\int_{0}^{\infty}f(t)e^{-ts}dt\)
\(f(t)=\frac{1}{2\pi j}\int_{\sigma-j\infty}^{\sigma+j\infty}F(s)e^{ts}ds\)
| 常见函数 | \(f(t)\) | \(F(s)\) |
|---|---|---|
| 单位脉冲 | \(\delta(t)\) | \(1\) |
| 单位阶跃 | \(1(t)\) | \(1/s\) |
| 单位斜坡 | \(t\) | \(1/s^2\) |
| 单位加速度 | \(t^2/2\) | \(1/s^3\) |
| 指数函数 | \(e^{-at}\) | \(1/(s+a)\) |
| 正弦函数 | \(\sin\omega t\) | \(\omega/(s^2+\omega^2)\) |
| 余弦函数 | \(\cos\omega t\) | \(s/(s^2+\omega^2)\) |
反变换:
- 公式法
- 查表法/分解部分分式法
- 试凑法
- 系数比较法
- 留数法
留数法之前复变函数证明过,回来有机会再整理吧.
其实挺好理解的。(题目中遇到的似乎都很简单!)
\(C_1=\frac{1}{(m-1)!}\lim_{s\to p_i}\frac{d^{(m-1)}}{ds^{(m-1)}}[(s-p_i)^mF(s)]\)