CH1. 系统的状态空间模型¶
1 状态和状态空间模型¶
线性系统状态空间模型可由积分器、加法器、比例器组成
本页之后用到的一些概念总结
友矩阵:大概长这个样子,\(\begin{bmatrix}0 & & I\\ -a_n & \cdots & -a_1\end{bmatrix}\), 最后一行可以直接写出该矩阵特征多项式.
对角矩阵:略
约当标准型:有的矩阵不能相似对角化,但是可以化为约当型
能控标准型:A 为友矩阵,B 最后一行为 1
能观标准型:A 为友矩阵,C 最后一列为 1
2 建立状态空间模型¶
机理建模:根据系统的物理机理建立对象的数学模型
- 弹簧 \(F=kx\)
- 阻尼 \(F=k\dot x=kv\)
graph LR
A["微分方程(组)"] -->|1, 3| B[状态空间方程];
A --> |2| C["传递函数(阵)"];
C --> |4| B;
-
机理建模: 通过物理机理列写微分方程组后,选取合适的状态变量(一般选择储能信号,例如电容电压), 之后整理成\(\dot {x_1}=f(\cdots)\)的格式,最后写成状态方程形式
✨这种方法获得的状态变量比较直观,可以单独列每个元件的数学表达式,不用整理成3那样的微分方程
不过状态空间方程不是任何一类标准的形式. -
对于 SISO 的单微分方程,拉氏变换之后即可整理成传递函数
-
由高阶常微分方程建立状态空间模型:\(y^{(n)}+a_1y^{(n-1)}+\cdots+a_ny=b_0u^{(n)}+\cdots+b_nu\)
- 微分方程中不含输入量的导数项
- 微分方程中含包含输入量的导数项
✨此方法获得的 A 为友矩阵,B 最后一行为 b, C 第一列为 1. 不是能控/能观标准型
但是此方法获得的系统一定是能控的! -
传递函数的实现: 见 这里
输入含导数项的状态空间方程的小总结
- 把方程列成标准形式,注意缺少的项要补齐,比如说右侧输入项与输出项同阶次的.
- 标好 a,b 都是什么.
- n 阶方程,状态方程也是 n 阶的(可以先画出状态方程的大致形状)
- 先求\(\beta_0\sim\beta_n\)
- 再求\(x_1\sim x_{n+1}\) 其中 \(x_{n+1}\) 只是占个位,不是状态变量
- 再写出\(\dot x_1\sim \dot x_{n}\) 其中 由于不知道 \(x_{n+1}\), \(\dot x_{n}\)通过记额外的公式写出来.
- 得出结果
不同形态状态空间方程之间的互相转换
这个太多了。. 就不总结了...
可以看约当标准型部分:其他形式变约当标准型. 把状态空间方程化成约当标准型
传递函数的实现问题
3 线性定常系统状态方程的解¶

3.1 状态转移矩阵¶
- \(\phi(0)=I\) 时间不变,状态不转移(选取的状态不能突变)
-
组合性质 \(\phi(t_2)=\phi(t_2-t_1)\phi(t_1)\)
\(X(t_2)=\phi(t_2-t_1)\phi(t_1)X(0)\) -
\([\phi(t)]^{-1}=\phi(-t)\)
求状态转移矩阵的方法
- 直接展开级数(不推荐,拟合太难
-
如果是对角标准型,则对角线上的 \(\lambda\) 变成 \(e^{\lambda t}\)
如果是约当标准型,则....
可以把 A 变换为上述标准型 -
拉氏变换法 \(L^{-1}\{(sI-A)^{-1}\}\)
- 凯莱-哈密顿定理(这个我不会~)
3.2 齐次解 \(\dot X=AX\)¶
\(X(t)=e^{At}X_0\)
- \(e^{At}\) 可以幂级数展开 (不推荐)
- 拉氏变换求解 \(L^{-1}\{(sI-A)^{-1}\}\)
渐近稳定,A 的特征值均具有负实部
3.3 非齐次解¶
- 时域求卷积\(x(t)=\int_0^te^{A\tau}u(t-\tau)d\tau=\int_0^te^{A(t-\tau)}u(\tau)d\tau\). (注意这个形式比较灵活,卷积位置可交换)
- 拉氏变换 \(X(s)=(sI-A)^{-1}[X_0+BU(s)]\).
其实有时候第一个方法比较简单。
比如说输入为阶跃信号,那么 \(x(t)=\int_0^te^{A\tau}u(t-\tau)d\tau=\int_0^te^{A\tau}d\tau\) , 只需要进行积分即可. 拉氏变换需要分解因式再反变换.
还比如说输入是一个分段函数,第二个方法可能就会非常复杂,第一个只需要分段求积分.
4 相图 ⇋ 特征值 ⇋ 稳定性¶
【Advanced 控制理论】3_Phase Portrait_相图_相轨迹_哔哩哔哩_bilibili
相图,似乎当初经典控制理论课程中讲过,这里就不赘述了..
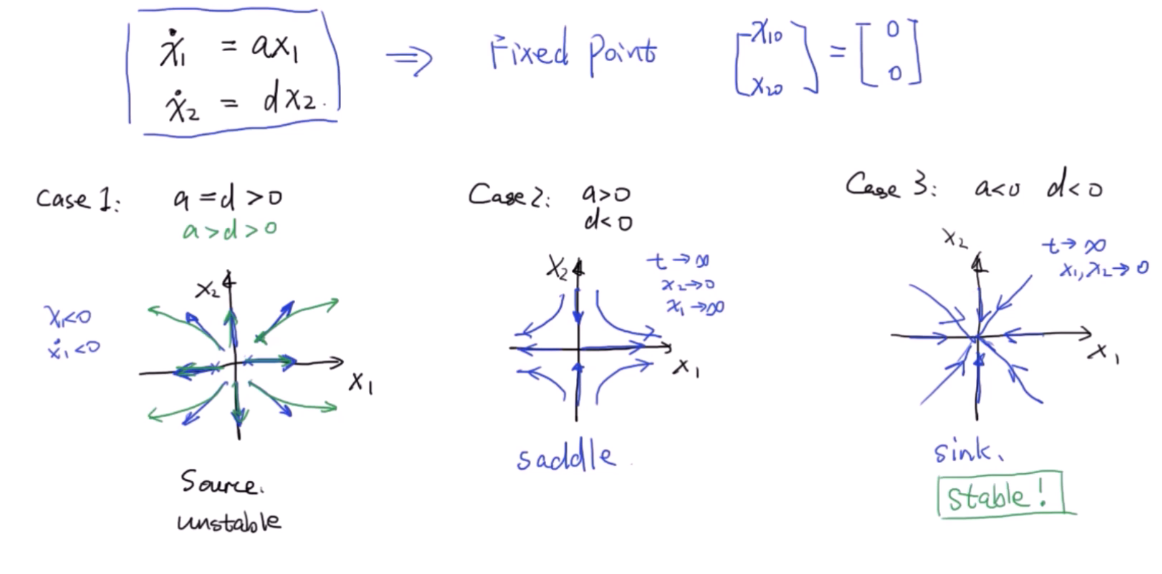
对于下图简单的情形:只有 2 个状态,且微分方程简单如下,通过分类讨论能够得出可能的情况.
source: 源;saddle: 鞍;sink: to fall or drop to a lower place or level
当且仅当 a, d 都小于 0 的时候,系统才是稳定的,\(t\to\infty\) 时,\(x_1,x_2\to0\)
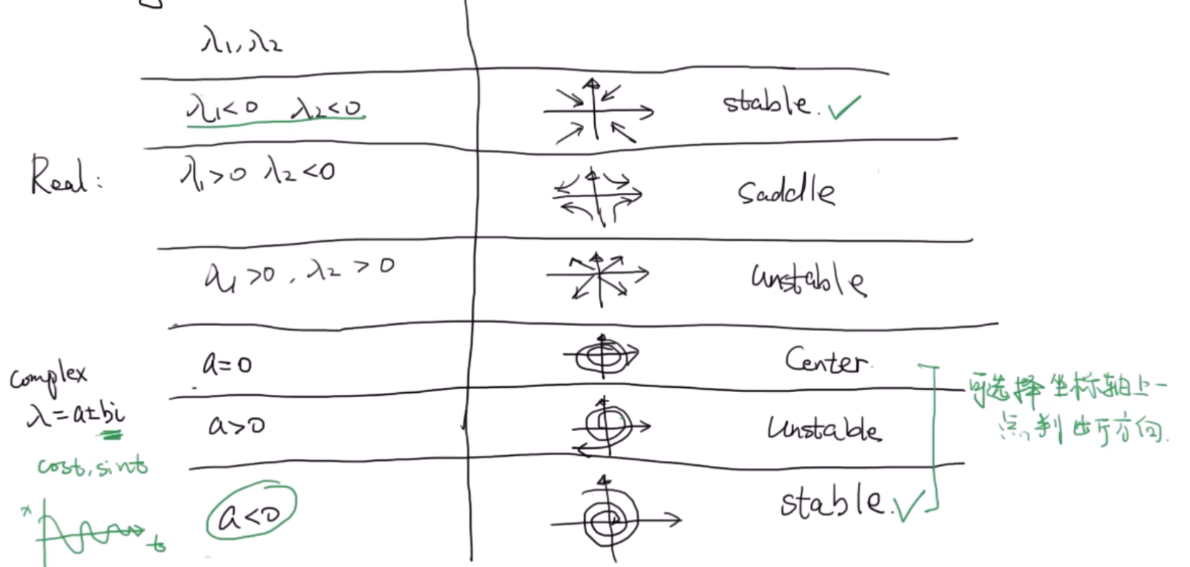
通过线性变换\(P^{-1}AP=\Lambda\), 能够把一般的状态空间\(\dot X=AX\)变换成上述的简单情况\(\dot Y=\Lambda Y\). 因此易得,原状态空间的相轨迹也是由 a, d 决定的. 而 a, d 其实就是状态矩阵 A 的特征值. AKA, 特征值决定系统稳定性.
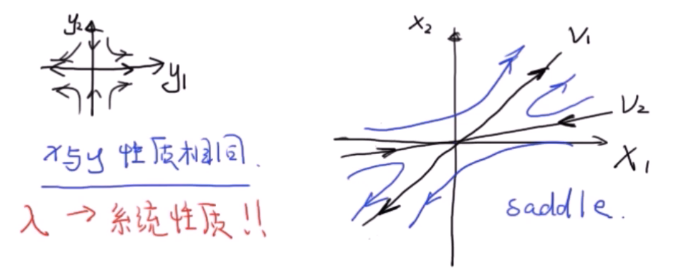
对于更复杂的系统,相轨迹也更加复杂,这里就不记录了,可以见原视频. 总之都由系统的特征值有关.
关于状态矩阵特征值和传递函数极点,可以用下面这俩理解
- 求特征值 \(|\lambda I-A|\).
- 求传递函数 \(C(sI-A)^{-1}B=C\frac{adj (sI-A)}{|sI-A|}B\)
5 系统线性变换、等价变换、状态变换 \(X=T\hat X\)¶
\(\hat A=T^{-1}AT\), \(\hat B=T^{-1}B\), \(\hat C=CT\)
- 代数上等价,输入输出特性不变
- 特征值不变,特征多项式系数不变,极点不变
- 传递函数阵不变
- 能控性能观性不变
线性定常系统特征值对线性变换具有不变性,因此线性变换 (\(T\)可逆的变换)是等价变换
上述性质默认前提为线性系统(非线性系统不知道)
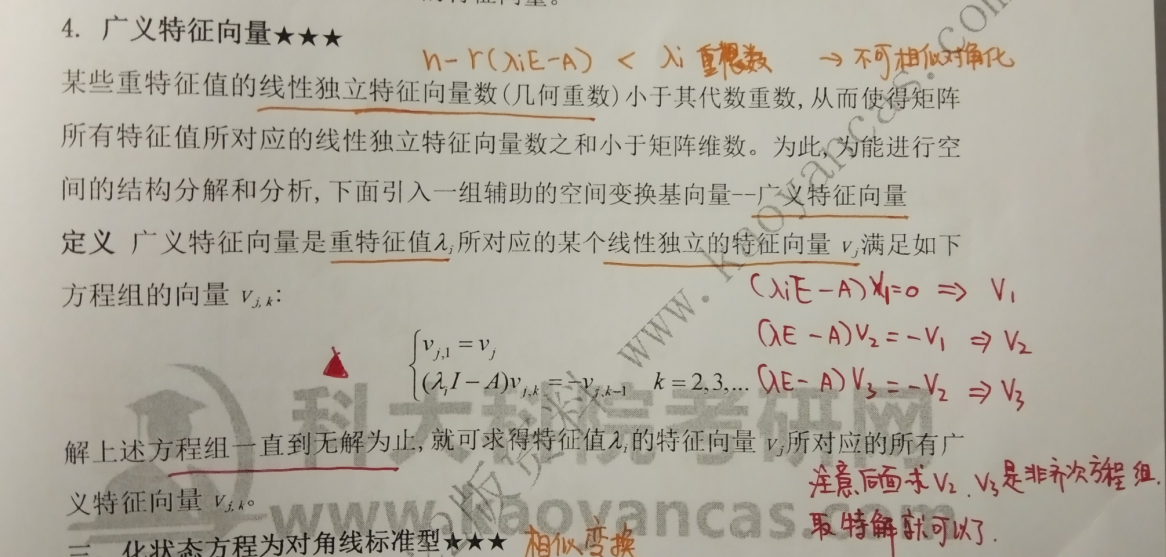
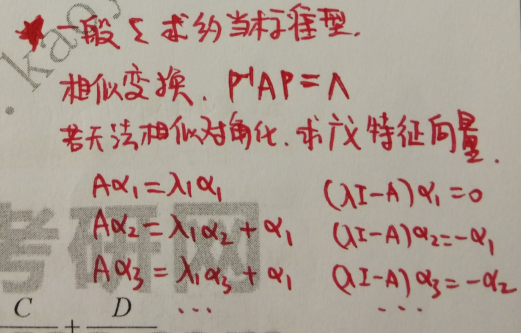
广义特征向量
限于时间精力,这里就不详细解释了..
- 特征值都不同⇒对角标准型 (参考线性代数相似对角化,对角线上是特征值)
- 特征值有重根⇒约当标准型 (广义特征向量)
友矩阵
大概长这个样子,\(\begin{bmatrix}0 & & I\\ -a_n & \cdots & -a_1\end{bmatrix}\)
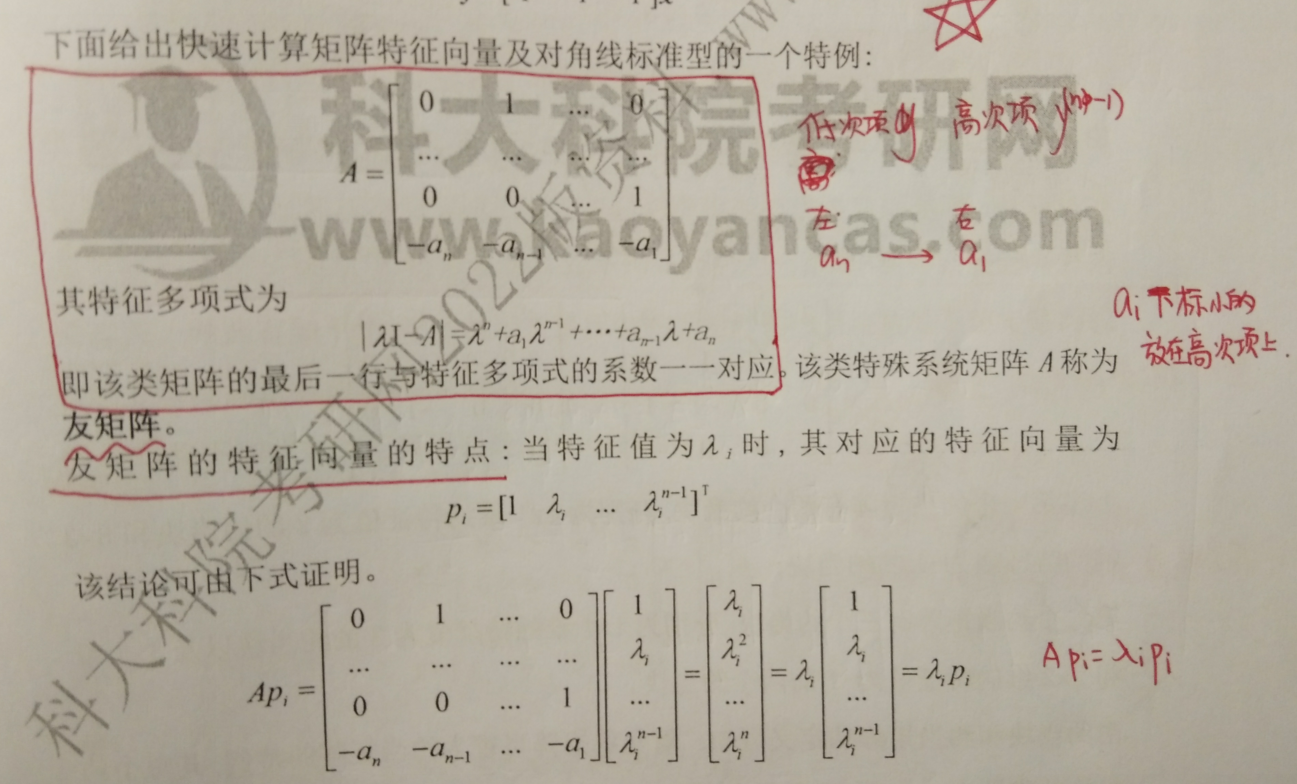
很多标准形式的状态矩阵都是友矩阵。
能控标准型化为约当标准型:
友矩阵特征值互异时,将友矩阵变换成对角线阵的变换矩阵恰为范德蒙矩阵.
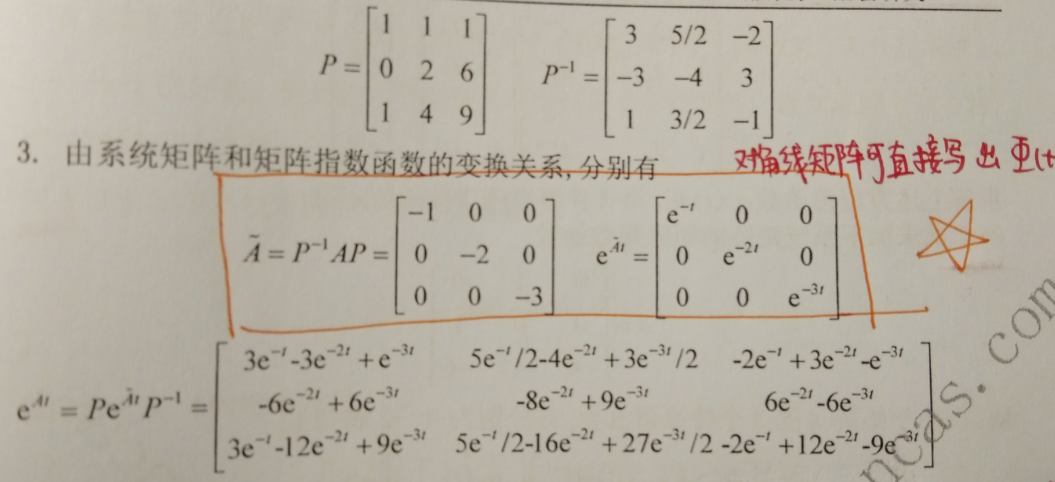
作用:\(\phi(t)=e^{At}=e^{P\tilde{A}P^{-1}t}=Pe^{\tilde{A}t}P^{-1}\)
其中\(e^{\tilde{A}t}\)可以直接写出来(对角线取指数), \(P\)也可以由特征值直接写出来.
有些情况下,可以简化求线性定常系统状态方程的解