CH3. 系统的稳定性¶
1 BIBO 稳定¶
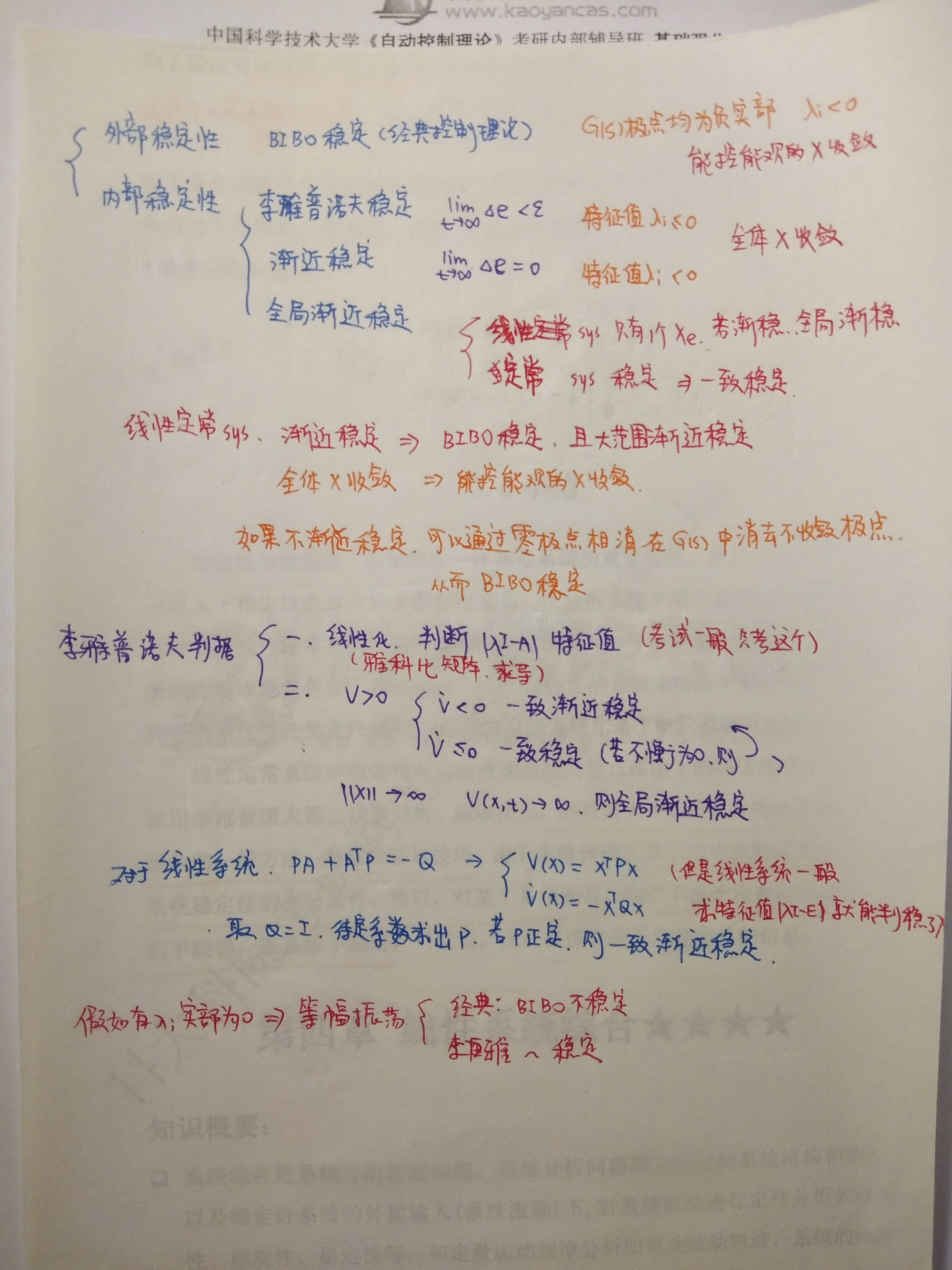
系统 BIBO 稳定 \(\Leftrightarrow\) 系统全体可控可观模式/模态收敛.
- 系统能控能观子系统的所有特征值均具有负实部
- 复数域:传递函数极点全部在左半平面.
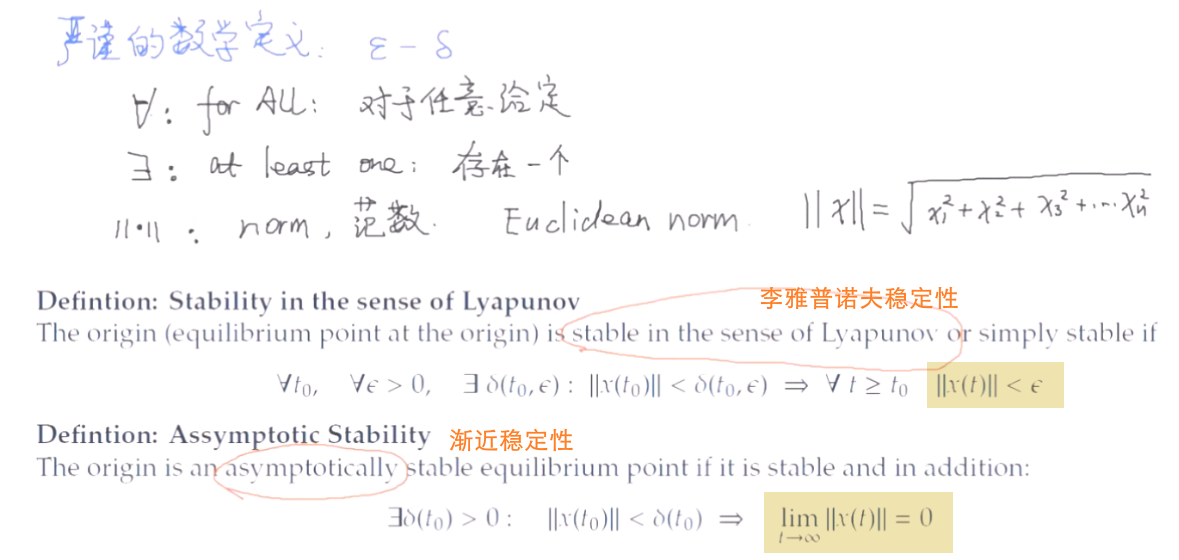
2 李雅普诺夫稳定¶
2.1 李雅普诺夫稳定的定义¶
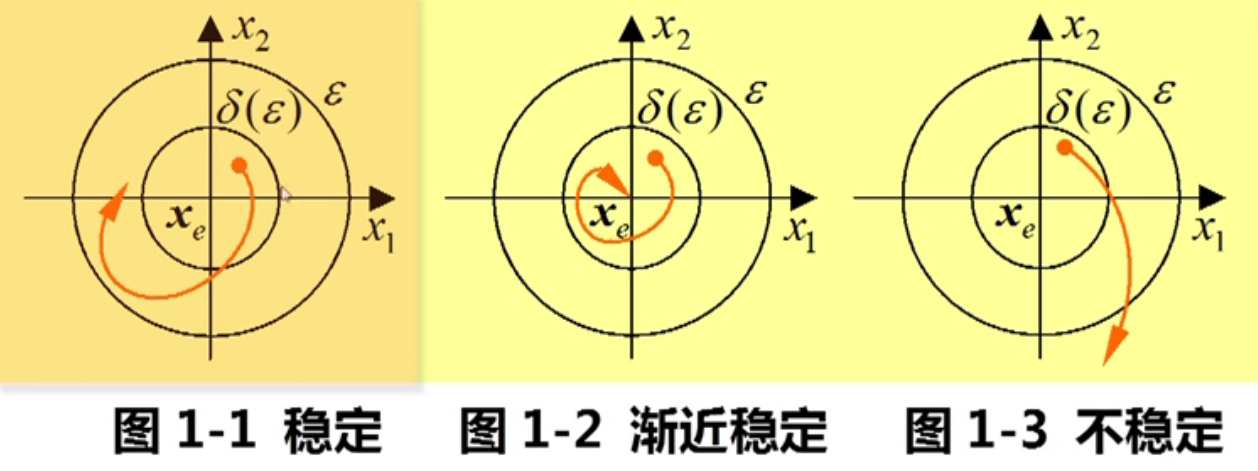
平衡态
平衡态指状态空间中状态变量的导数向量为零向量的点,因此平衡态指能够保持平衡,维持现状不运动的状态. \(\dot{x} = f(x,t)\equiv 0\), 记为 \(x_e\)
当矩阵 A 非奇异时,线性系统只有一个孤立的平衡态 \(x_e=0\)
对于非线性系统,通常有一或多个孤立平衡态,对应于 \(f(x,t)\equiv0\) 常值解.
对于其孤立平衡态,总是可以通过坐标变换将其移到状态空间的原点
因此,我们常把平衡态取为状态空间的原点.
2.2 李雅普诺夫方法¶
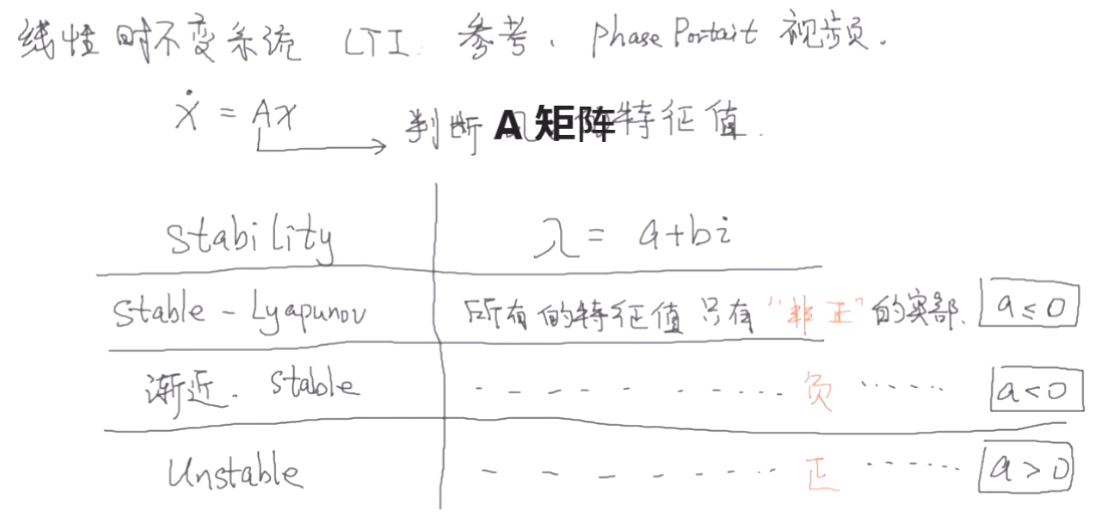
2.2.1 李雅普诺夫第一法,间接法:判断特征值¶
- A 特征值均具有负实部,则渐近稳定;
- 存在特征值具有正实部,则不稳定;
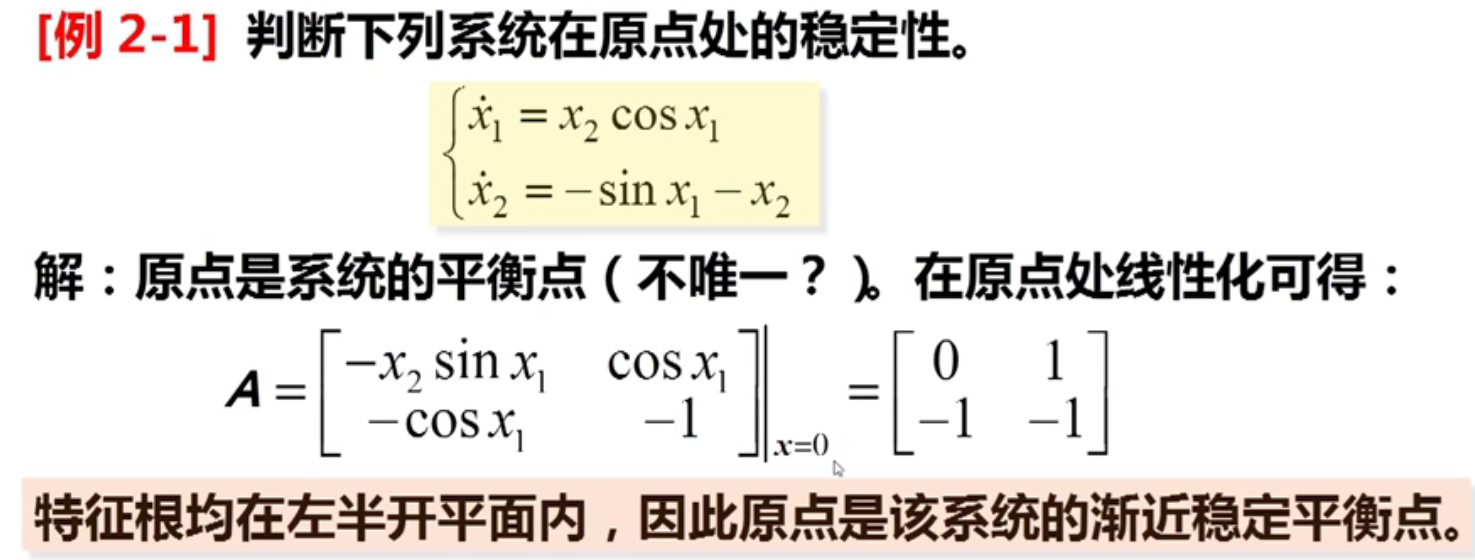
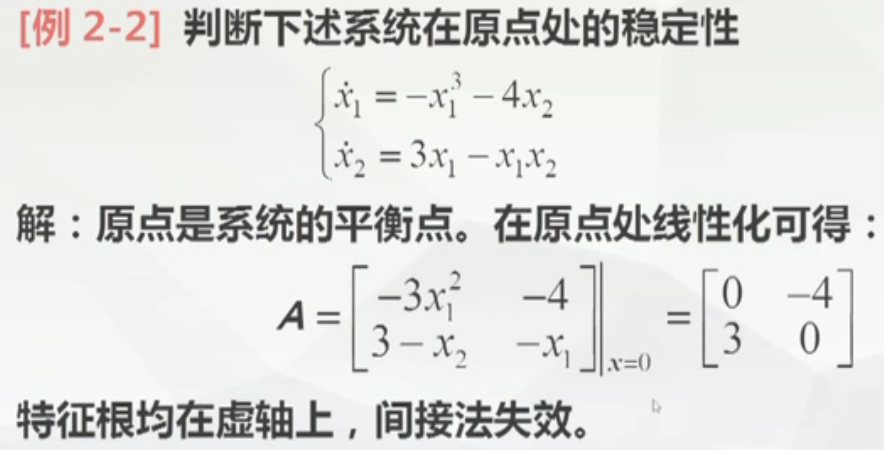
对于非线性系统,可以将系统的描述在平衡点附近线性化,判断线性化模型 A 的特征值. 其他情况无法判断
可以这样理解,对于一个普通的一元函数,由泰勒公式有 \(y=f(x)=f(0)+f'(0)x+\cdots\).
而对于 \(\dot x_1=f(x_1,x_2)\), 一般来说原点处是平衡点,\(f(0,0)=0\). 则一阶展开能够得到 \(\dot x_1=f'_{x_1}(0,0)x_1+f'_{x_2}(0,0)x_2\).
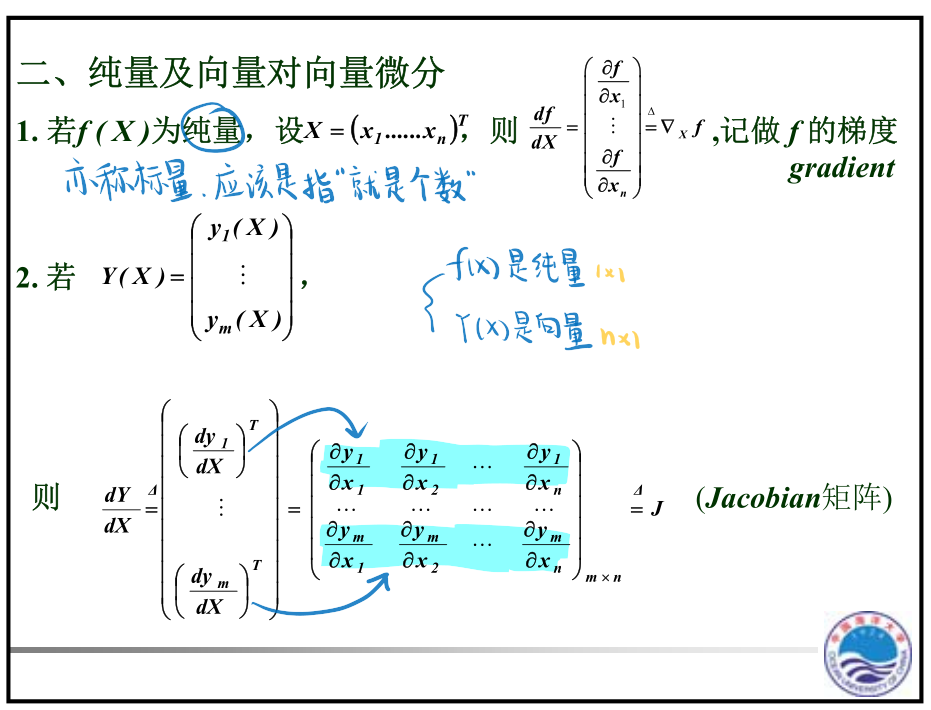
总之,更成熟的表述方法应该是雅可比矩阵
Example
2.2.2 直接法(第二方法)¶
2.2.2.1 判别标准¶
标量函数的定号性
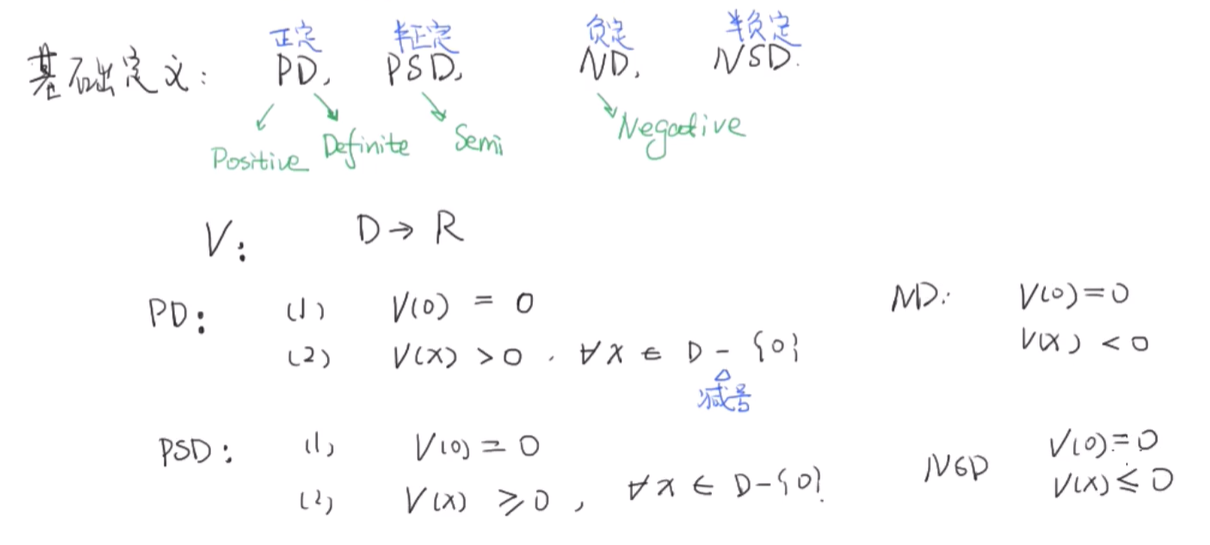
- 实函数正定性:对于任意 n 维非零向量 \(\boldsymbol{x}\in \Omega\)
- \(V(x)>0, V(0)=0\) 正定
- \(V(x)\ge0, V(0)=0\) 半正定
- \(V(x)<0, V(0)=0\) 负定
- \(V(x)\le0, V(0)=0\) 半负定
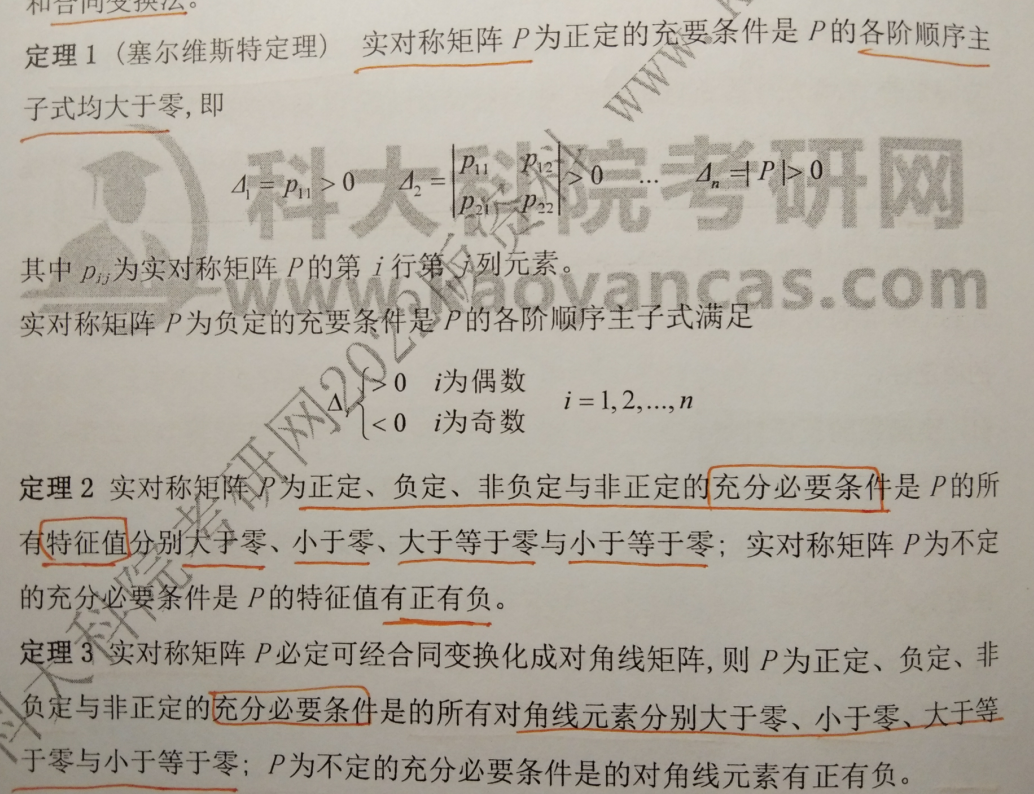
- 矩阵正定性/二次型正定性:实对称矩阵 P
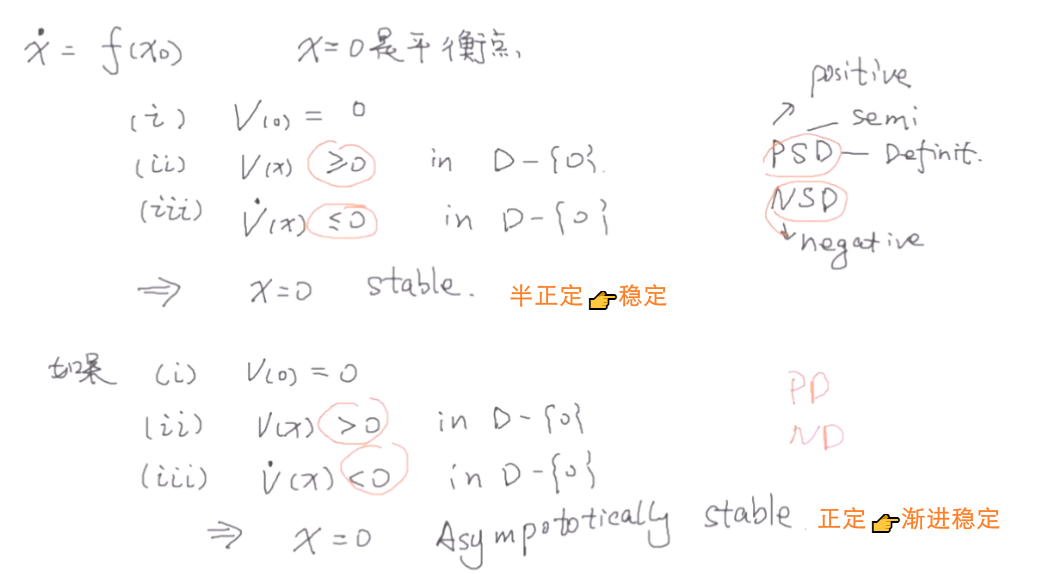
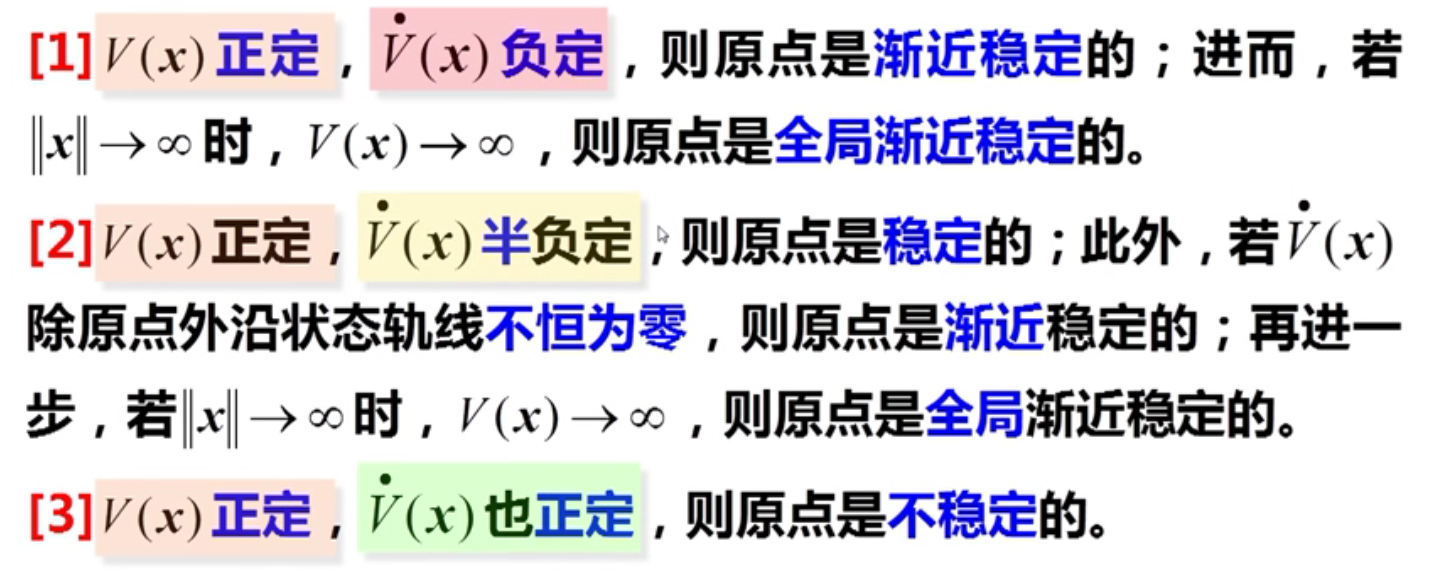
导数负定,相当于能量函数衰减

Attention
李雅普诺夫第二法给出的结果是充分条件,所以构造不出李雅普诺夫函数,只能说无法提供有关系统稳定性的信息,而不能说该系统不稳定
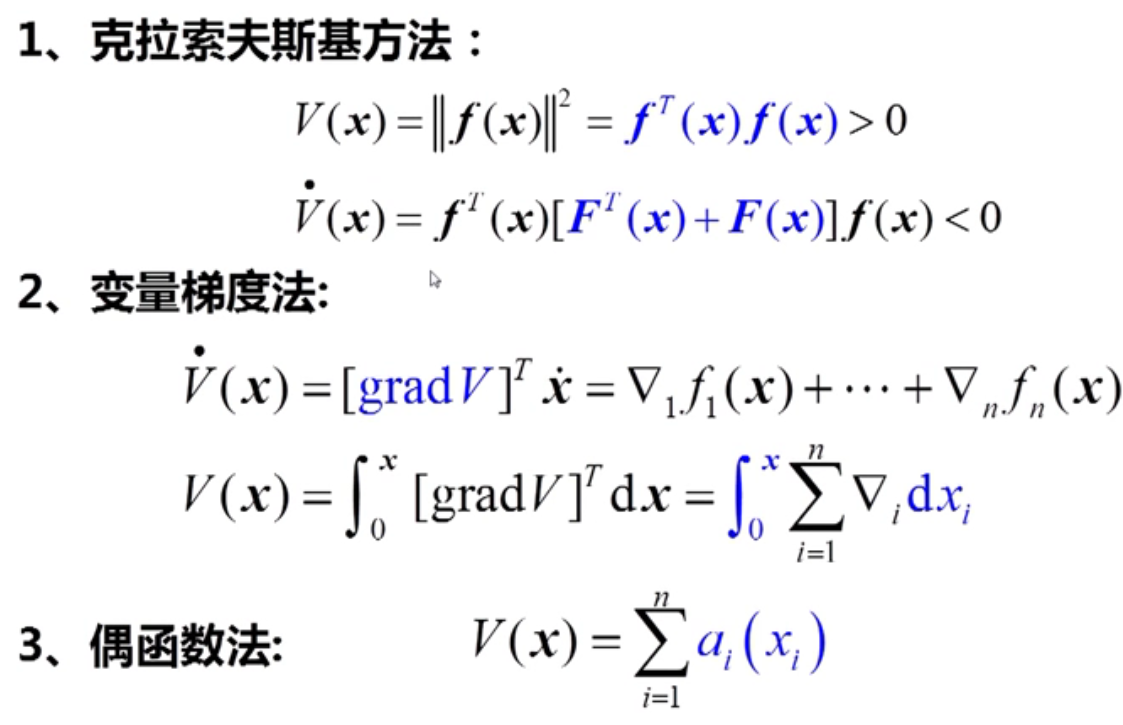
2.2.2.2 构造李雅普诺夫函数的方法¶
3 线性系统的稳定性分析¶
线性系统 BIBO 稳定 ⇒ 渐近稳定


使用方法:
- 选择单位矩阵 I 作为 Q
- 设 P, 通过等式 \(A^{T}P+PA=-Q\) 求 P
这里没有什么很好的方法,好像只能设 p 每个位置的参数. 注意 P 是实对称矩阵!2x2 只需要设 3 个参数 - 判断顺序主子式是不是都大于 0 (矩阵是否正定)
- 如果正定,就渐近稳定,负定,就不稳定
理解&证明
线性定常系统状态方程为 \(\dot{x}=Ax\)
选取正定二次型函数、李雅普诺夫函数为 \(V(x)=x^TPx\)
则有 \(\dot{V}(x)=\dot{x}^TPx+x^TP\dot{x}=x^T(A^TP+PA)x=-x^TQx\)
《自动控制原理》(第六版)
一般地说求解李雅普诺夫方程并非易事,因而这种方法往往不用来判断系统的渐近稳定性,而是用来构造线性定常连续渐近稳定系统。

