自抗扰控制原理笔记¶
关于参考资料:在每个标题后面用引用的形式给出.
辅助基本概念理解… 可能有不准确的地方,再深入的推导证明啥的我就不费力写了
1 基本概念¶
Cite
ADRC 是在 1990 年左右韩京清教授发明,在 PID 基础上做的一种创新。2003 年高志强教授在 ADRC 基础上,提出了简化版的 LADRC,将调解参数降为 3 个,极大方便了参数整定。学习 ADRC 有一个 B 站的公众号一定要关注一下,叫做:“自抗扰控制 ADRC”,是高志强教授在 B 站的做的科普账号,可以加到他们的 QQ 群里学习。
自抗扰控制 adaptive disturbance rejection
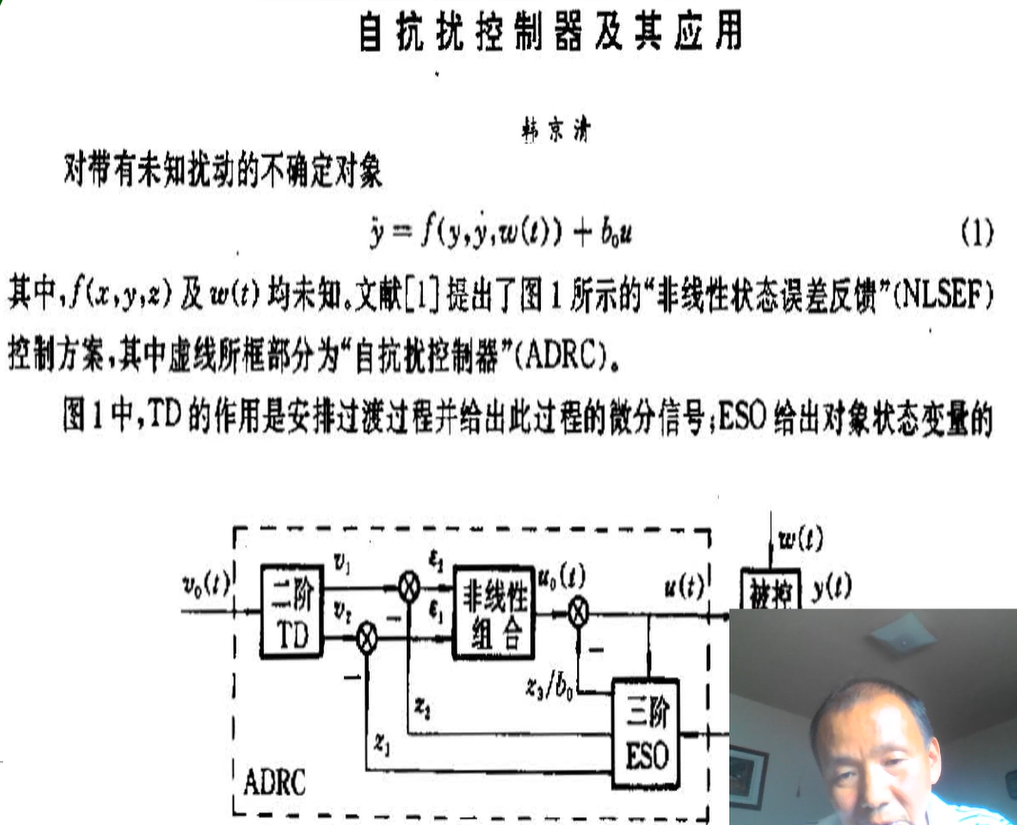
- 跟踪微分器 TD: 安排过渡过程并给出此过程的微分信号(指令和指令的微分都应该给控制器,这样能够更好跟踪指令)
- 扩张状态观测器 ESO: (感觉就是状态观测器,但是额外观测了一个总扰动) 把未知的扰动 f 估计出来,用控制器实时抵消掉,使控制系统接近理想对象(串联积分器). 系统是二阶的,ESO 就是三阶的
传统控制器是通过输出变化与输入做差,形成误差信号进行控制. ESO 是直接通过系统的输入输出观测到总扰动. - 误差反馈控制,非线性组合:控制器用非线性的
不确定 → 确定;
被扰动 → 无扰动
- \(b_0\) 物理量
- \(\omega_o\) 观测器带宽:观测器一定要能跟上扰动 f (f 在某个频域范围内)
- \(\omega_c\) 控制器带宽:一般教科书说\(\omega_c\approx\frac13\omega_o\)
三个参数不是盲目调的,要根据理解.
2 积分器串联型&总扰动¶
线性/非线性系统,在反馈的作用下,都可以回归于积分器串联型.
这样控制器基于积分器串联型设计就可以了。
注释:对于二阶积分器串联型,可以理解,\(y=\iint bu_0\), \(\ddot{y}=bu_0\)
二阶串联积分
对于一个典型的带阻尼弹簧力学模型,位移 s, 拉力 F, 有系统模型 \(\ddot{s}=\frac{F-k_1s-k_2\dot{s}}{m}\)
我们把后面的 \(\frac{-k_1s-k_2\dot{s}}{m}\) 当作扰动,想办法抵消掉,即令 \(F=F+k_1s+k_2\dot{s}\),
则系统关系将被转化为 \(\ddot{s}=\frac{F}{m}\), 即二层积分关系 \(G(s)=\frac{1}{m}\frac{1}{s}\frac{1}{s}\)
要构建 \(F=F+k_1s+k_2\dot{s}\), 我们需要知道 \(s, \dot s\) 这样的值,即观测状态,于是用到状态观测器. 实际上,引入总扰动的概念,则我们想要观测的只是总扰动 \(w=k_1s+k_2\dot{s}\) 这一个状态变量.
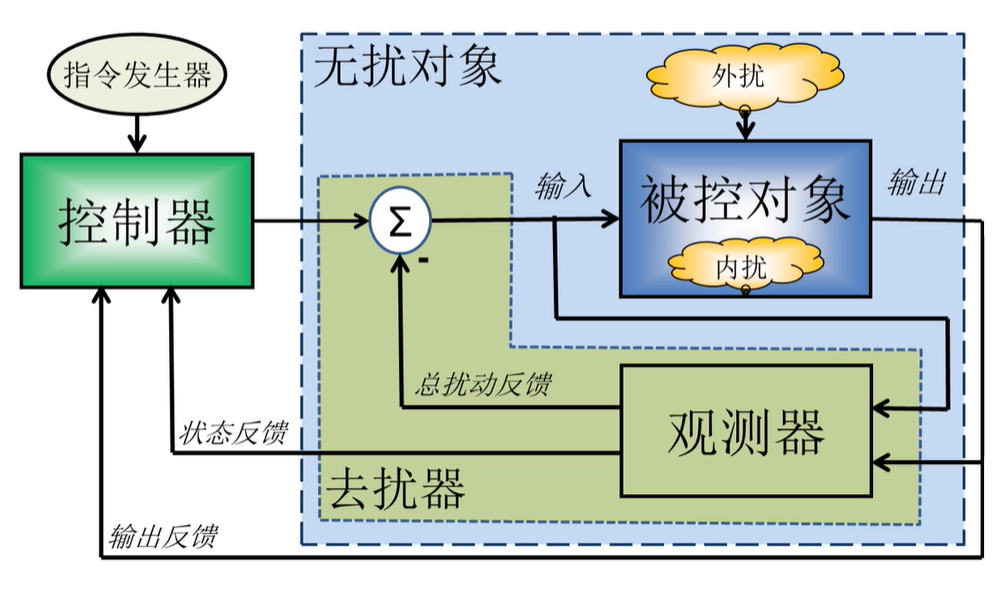
被控对象 = 积分器串联型 + 总扰动 (内外扰动)
用控制信号抵消掉总扰动,剩下的就是无扰动的标准型(积分串联型), 针对这种简单形式的标准型设计控制器就简便很多。
2.1 进一步理解¶
我的理解: 积分器串联型简而言之就是说,输入是 u, 输出是 y, 那么对于 n 阶系统,有 \(y^{(n)}=bu\)
这里以三阶系统为例,有 \(y^{(3)}=bu\), 你可以设 \(x_1=y,\;\dot{x}_1=x_2,\;\dot{x}_2=x_3,\;\dot{x_3}=bu\)
写成状态空间方程为:
这里其实不用通过状态空间方程理解,但为了后面 ESO 部分和课本学习观测器设计串联,这里总结一下.
当然实际系统往往存在扰动,并且不是串联积分的形式. 例如前面提到的有阻尼弹簧震动系统中 \(\ddot{s}=\frac{F-k_1s-k_2\dot{s}}{m}\).
这里以一个一般性的二阶形式为例 \(\ddot{x}=bu+a_1\dot{x}+a_0x+w\)
为不失一般性,末尾有 w 是未知的扰动.
那么这时候系统就可以写成:
写成这种形式后,我们通过把总扰动当作第三个状态变量,即 \(x_3= a_1\dot{x}+a_0x+w\), 则有 \(\dot{x}_2=bu+a_1x_2+a_0x_1+w=bu+x_3\) 令 \(\dot{x}_3=h\), 则系统状态空间方程为:
这样就变成了刚开始的形式。.. (TODO) 唯一的问题可能就是,这里直接就写成了这样,而所有系统都能写成这种形式吗?好像没有证明.
原系统被视为 \(\ddot{x}=bu+a_1\dot{x}+a_0x+w=bu+f(\dot{x},x,t)+w(t)=\text{积分器串联型 + 总扰动}\)
\(f(\dot{x},x,t)\) 表示内部不确定动态
\(w(t)\) 表示外部未知扰动
3 状态观测器&ESO¶
基于视频 自抗扰控制器(ADRC)学习笔记 以及自己的理解进行下面的笔记. (TODO 不确定是否为官方思路..)
视频中是每个状态分开讲的,下面我是以设计伦伯格观测器的思路对 ESO 的设计进行的总结
Cite
重新建立状态观测器的概念是学习自抗扰控制必须迈过的一个台阶。控制专业的同学可能不理解,状态观测器的设计怎么能不依赖模型信息?非控制专业的同学和工程师们可能不理解,扰动信息是怎么实时估计出来的?
状态观测器:现代控制理论中,通过系统的输入输出估计系统状态 \(\hat{X}\) . 具体参考现控笔记中的"龙伯格观测器"
\((y-\hat{y})\) 是一个观测得到的误差项,在之前的学习中,由于我们已知系统模型的全部信息,所以进行了进一步化简,将设计观测器问题转化为配置观测器的极点,即设计 \(A-LC\) 的特征根.
前面提到过 串联积分型的状态空间表达及其理解, 我的理解是,对于一个未知模型的系统,我们只需要知道阶数就可以构建出一个标准形态的状态空间方程.
对于这样一种形式的系统进行观测器设计,有 \(y=x_1,\;y-\hat{y}=x_1-\hat{x}_1\) , 令 \(L=\begin{bmatrix}\beta_1&\beta_2&\beta_3\end{bmatrix}^T\) , 整理可得我们的观测器为:
这里有一种假设, 我也不太清楚,就是设计观测器时忽略掉了扰动 h 的作用,观测器仍可以逼近真实的状态)
\(|\lambda I-A|=\lambda^3+\beta_1\lambda^2+\beta_2\lambda+\beta_3=0\) 即为观测器的极点,例如配置成 \((s+\omega)^3\) 时,\(\beta_1=3\omega,\;\beta_2=2\omega_3,\;\beta_3=\omega^3\)
从这个角度来看,这种状态观测器的设计方法不需要除阶次以外的模型信息..
4 线性自抗扰控制器 LADRC¶
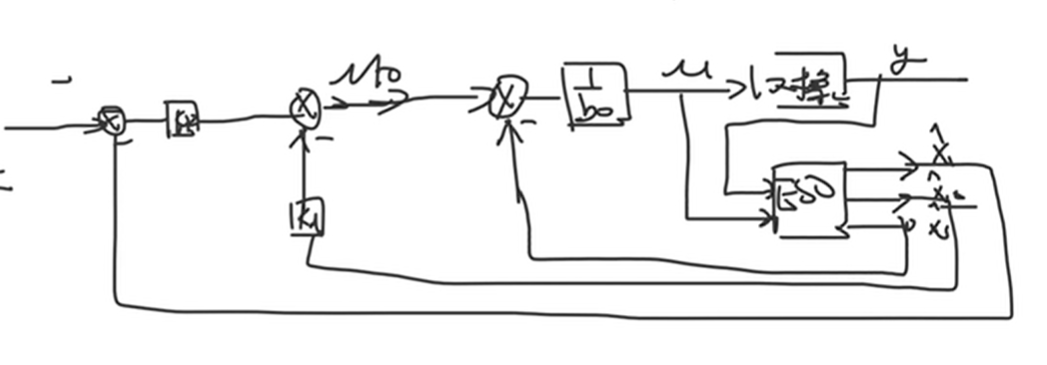
对于 \(\ddot{y}=bu\), 即二阶积分系统\(\frac{b}{s^2}\)进行控制,可采用 PD 控制器.
设给定值 \(sp\), 误差信号 \(sp-y\), PD 控制信号 \(K_p(sp-y)+K_d(sp-y)'\)
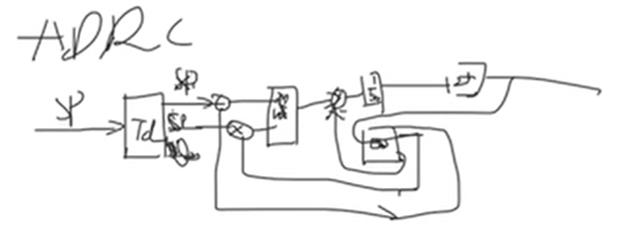
而 \(y,y'\) 都已经由 ESO 观测得到,因此只需要知道给定值及其微分,因此 ADRC 结构如下所示
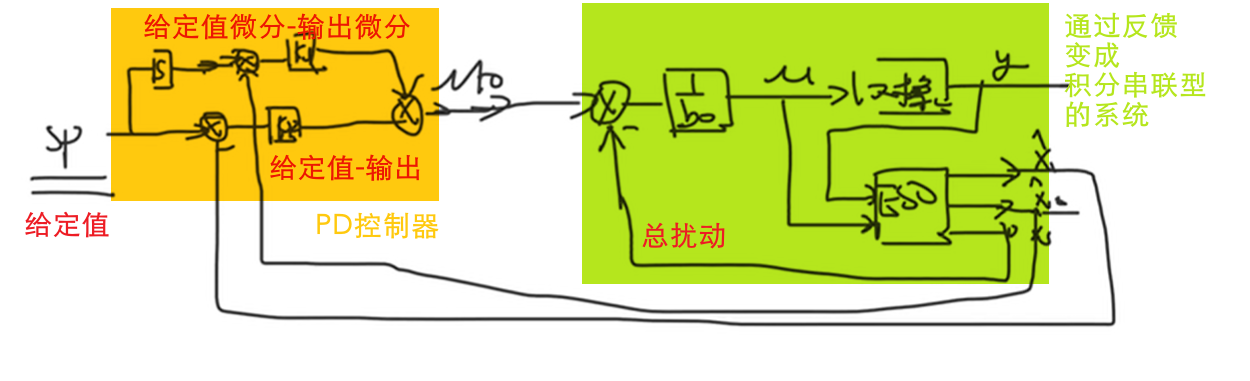
而实际上获得输入信号的微分不太方便,因此 ADRC 有一个 TD 跟踪微分器 可以很好地获得给定值的微分.
另外通过非线性组合模块实现\(sp-y\)及其导数的组合
根据 自抗扰控制器(ADRC)学习笔记_哔哩哔哩_bilibili 里面的说法,在给定值是阶跃或者常值时,其微分为 0, 就简化为 LADRC
LADRC 是 ADRC 的一个特例
- LADRC 的整定参数只有三个 \(b_0,\omega_0, \omega_c\)
- \(b_0\) 是由系统决定的,感觉有点像增益那个意思..?
- \(\omega_0\)
- \(\omega_c=\frac{\omega_0}{3\sim 10}\)
- ADRC 整定参数有 12 个
4.1 TD 跟踪微分器¶
\(\frac{s}{Ts+1}\) 实际可以造出来,模拟微分环节,但是对噪声很敏感.
5 为什么研究自抗扰¶
工程控制本质问题
-
稳定性(十九世纪,起于天体力学:Airy, Maxwell, Lyapunov)
瓦特设计蒸汽机,很多存在振动问题,引起对于稳定性的讨论研究 -
最优性(二十世纪,起于应用数学:LQ,\(H_{inf}\), …)
-
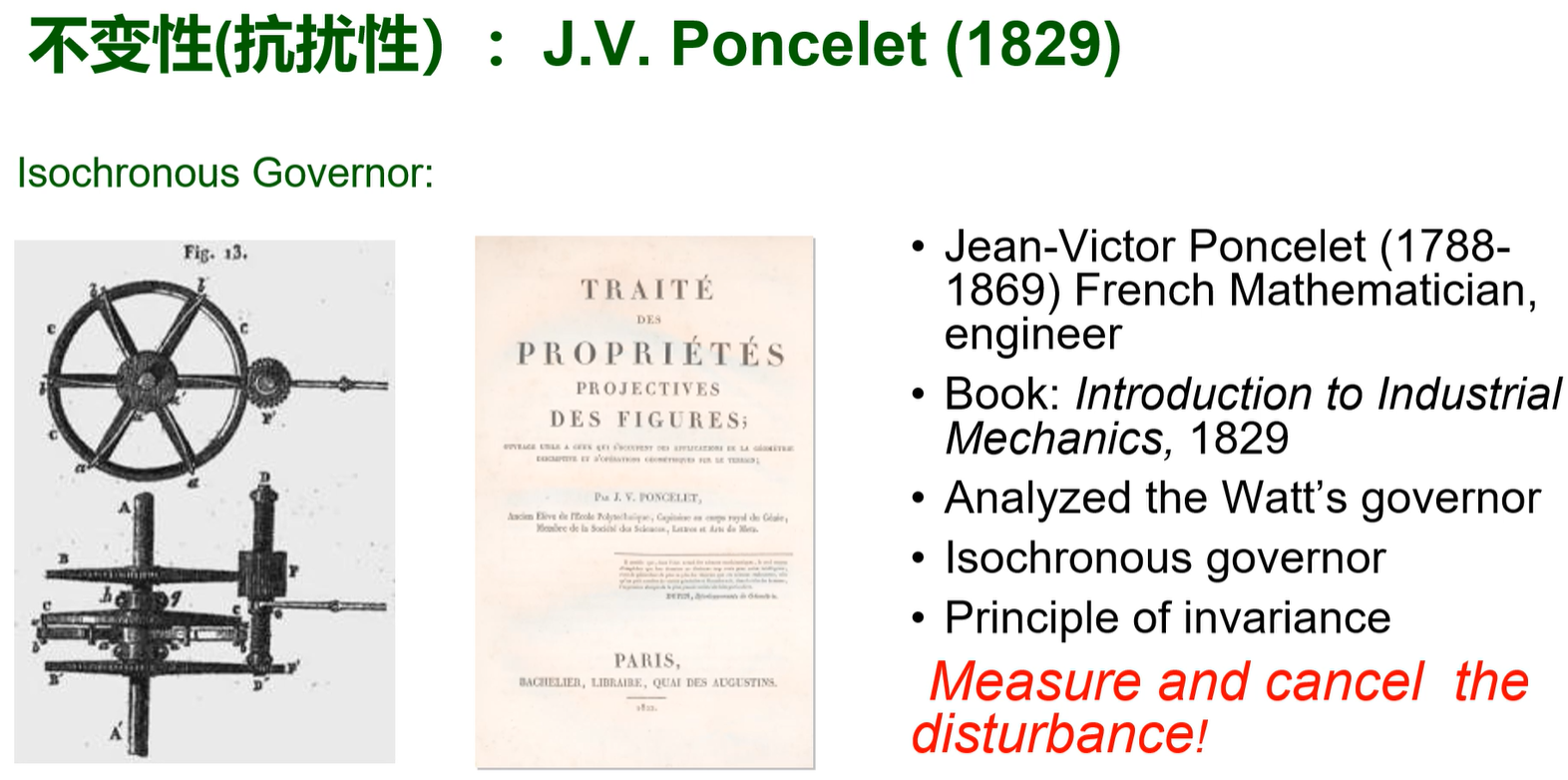
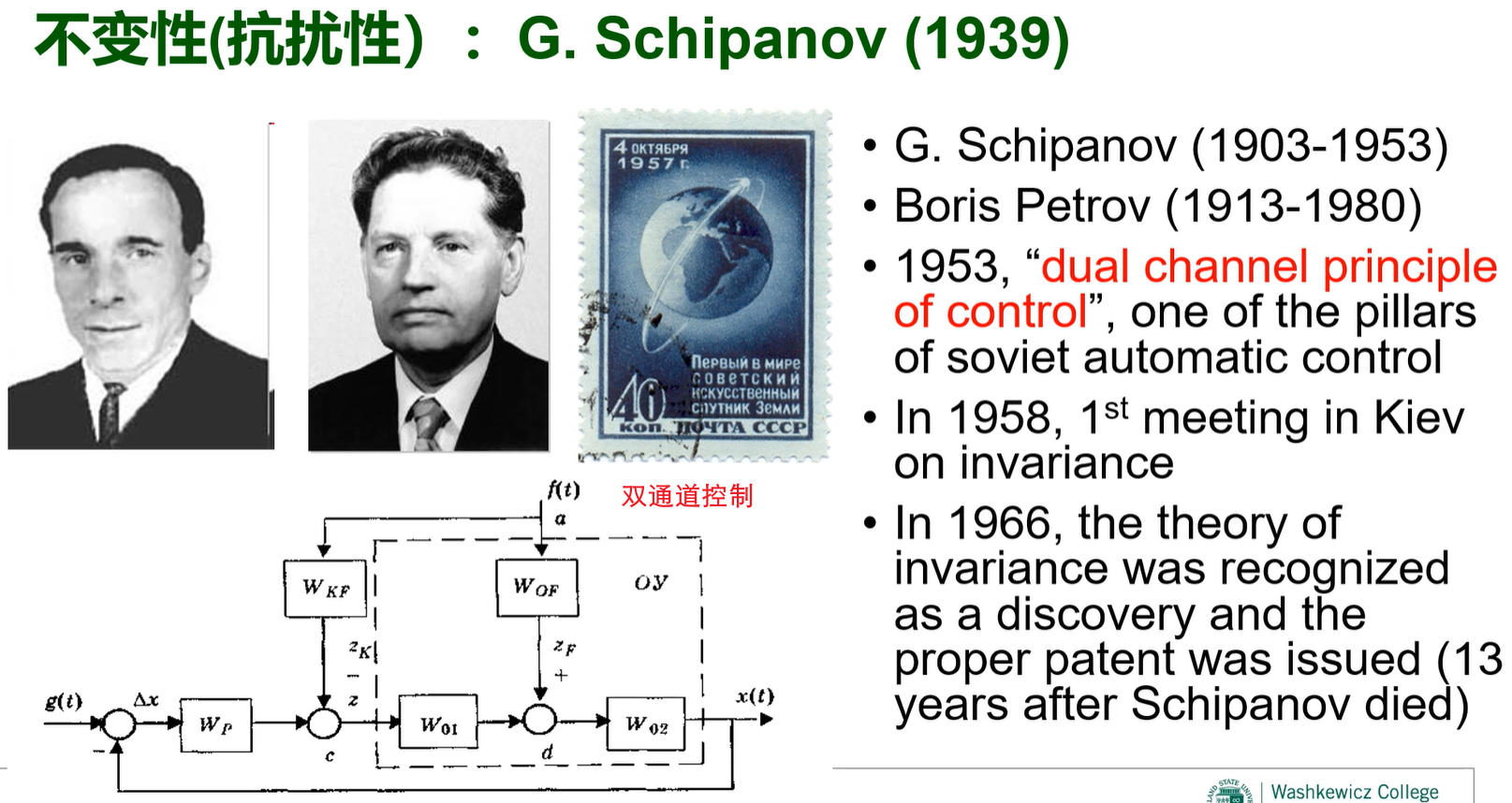
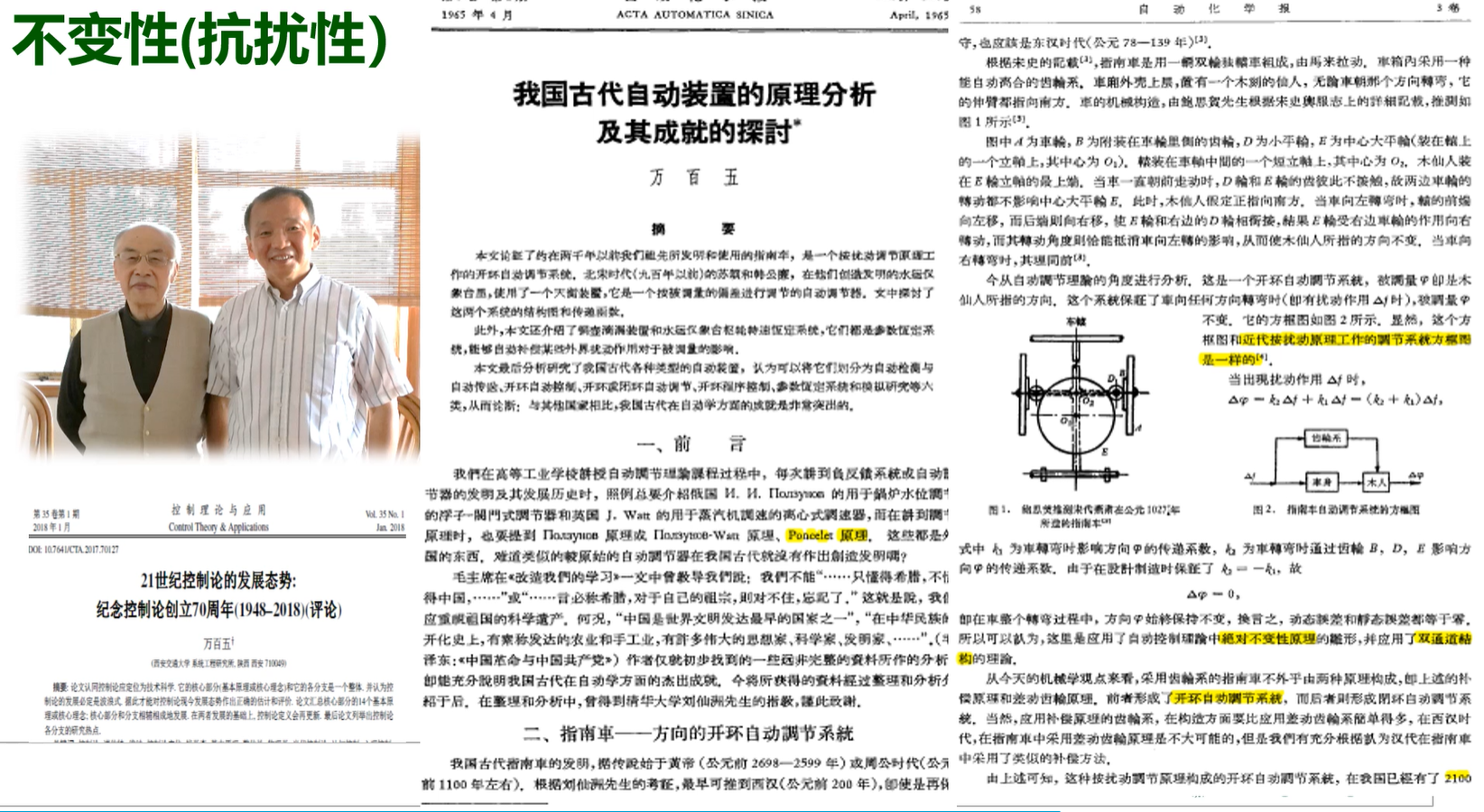
不变性、抗扰性、抗外扰(指南车,Poncelet 1829,Schipanov 1939, C.D. Johnson 1968,万百五
1963, CCC 1979,关肇直 1980,韩京清 1981,Ohnishi 1983,…)
使用一个快速响应的 Governor 应对蒸汽机的振动问题
俄国不变性理论
-
模型前提下的动态不确定性(抗扰控制,鲁棒控制,自适应控制,模型预测控制)
-
自抗扰:不基于模型,抗总扰动(内扰+外扰)(钱学森 1954,韩京清 1989,1998)
概念区分:
- 不变性理论、双通道原理、复合控制、抗扰控制:双自由度,添加对扰动信息的反馈
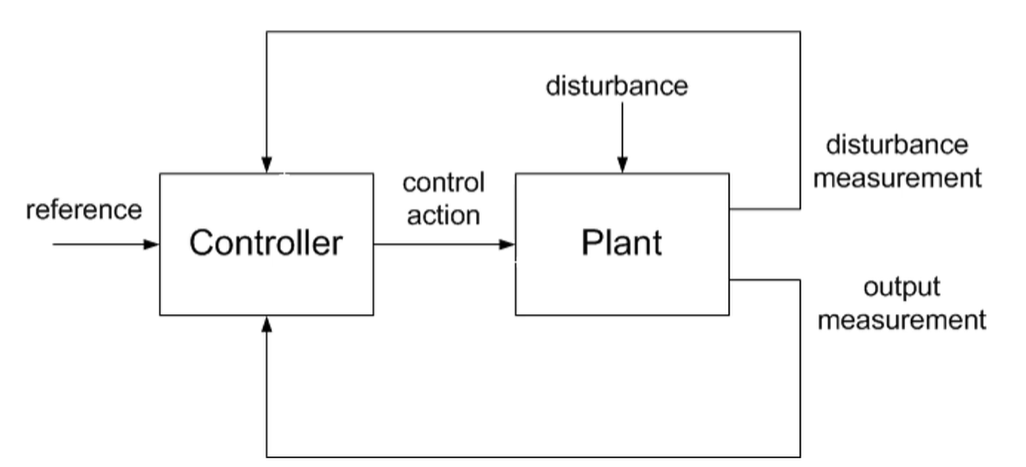
- 自抗扰性:和之前的抗扰不是一个概念,系统的动力学模型当作"内扰", 抵抗"总扰动"的"自抗扰控制器"是一个独立于模型的控制器(根据理想模型设计控制器).
6 Furthermore¶
QQ 群:914841616
游客进入后群文件夹里找参考资料
https://www.bilibili.com/video/BV1ot4y1i7Af/?spm_id_from=333.788.recommend_more_video.1
https://www.bilibili.com/video/BV19v411q7Xi/?spm_id_from=333.788.recommend_more_video.3
https://www.bilibili.com/video/BV1fh41127Tw/?spm_id_from=333.788.recommend_more_video.18
https://www.bilibili.com/video/BV1yK4y1K7wB/?spm_id_from=333.788.recommend_more_video.4
自抗扰控制理论(三)线性 ADRC 的实现与仿真 - 知乎