ADRC 设计¶
本科教学:自抗扰控制的设计与仿真_哔哩哔哩_bilibili
PID: 自校正原理,出现误差,进行调整.
ADRC: \(\dot{y}=-ay+bu\to \dot{y}=f(y,d,t)+bu\)
估计出 \(\hat{f}\) , 令 \(u=\frac{-\hat{f}(t)+u_0}{b}\), 则可以使 \(\dot{y}=u_0\)
在控制之前,使系统动态接近一个理想的积分器的动态.
如何估计 \(f\)?
- \(f=\dot{y}-bu\), 因此对 y 求导再滤波就可以. \(\hat{f}=\frac{s}{\tau s+1}y-bu\approx \dot{y}-bu\) (DOB)
- ESO 扩张状态观测器
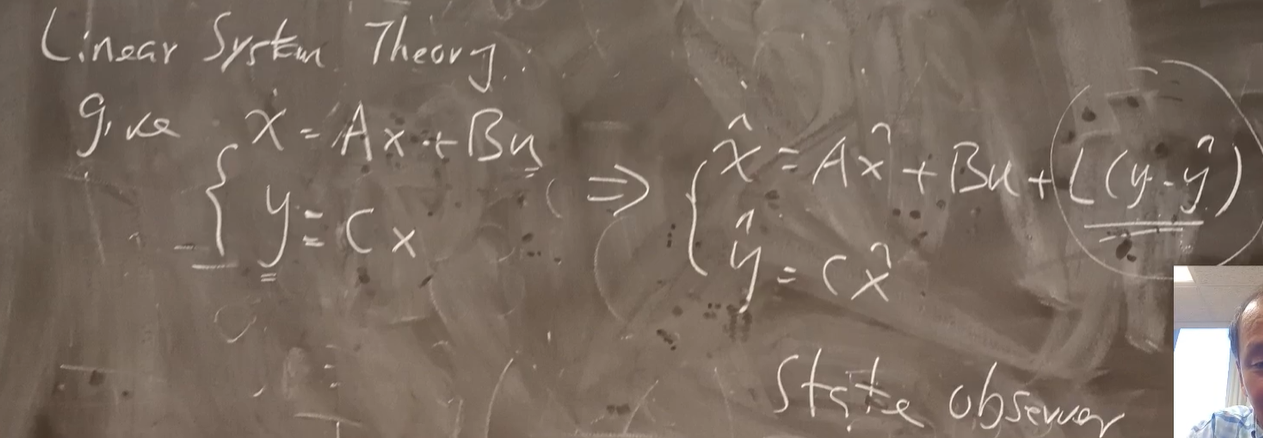
状态观测器
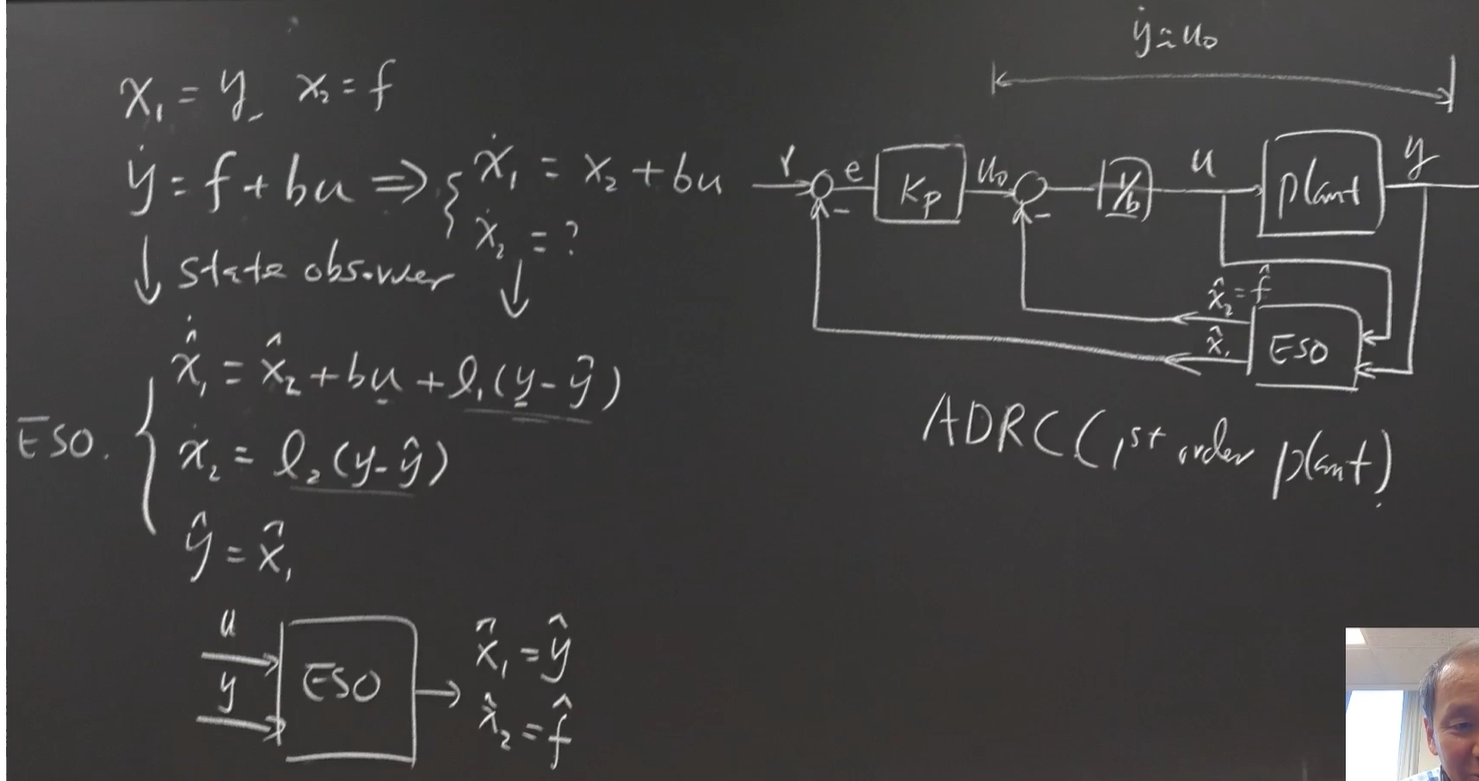
一阶系统