CH2. 线性系统的能控性和能观性¶
能控能观性 ⇒ 最优控制,最优估计
1 能控性¶
1.1 概念¶
x 能变,且能任意变,而不是有约束地变
- 如果有限时间内可以有某一个 u, 使状态从 非零有限点(视为误差)到达状态空间的原点 (0), 则能控.
- 从相轨迹的角度去理解,能控性是指存在一段相轨迹,起点是原状态位置,终点是期望状态位置.
- 可控指理论可控,现实系统需考虑物理约束
注释:
- 分清状态可控与系统可控:系统可控要求当前时刻所有状态可控
- 对于线性定常连续时间系统,能控等价于能达. 离散系统和时变系统,两者不等价.
- 非奇异变换不改变能控性 \(\hat Q_c=T^{-1}Q_c\)
Note
能控性:存在控制使状态从某个位置回到零点
能达性:存在控制使状态从零点到达某个位置
1.2 能控性判据¶
Info
模态判据应该和吉尔伯特判据是一个意思
前者是看的一个 b 站网课上的提法,没好好总结
后者是考研复习资料上的提法
- 模态判据:如果是对角标准型,A 对角线是特征值,状态之间没有耦合, 则若 B 没有全零行,则状态完全能控. (如果是约当标准型,... 略)
-
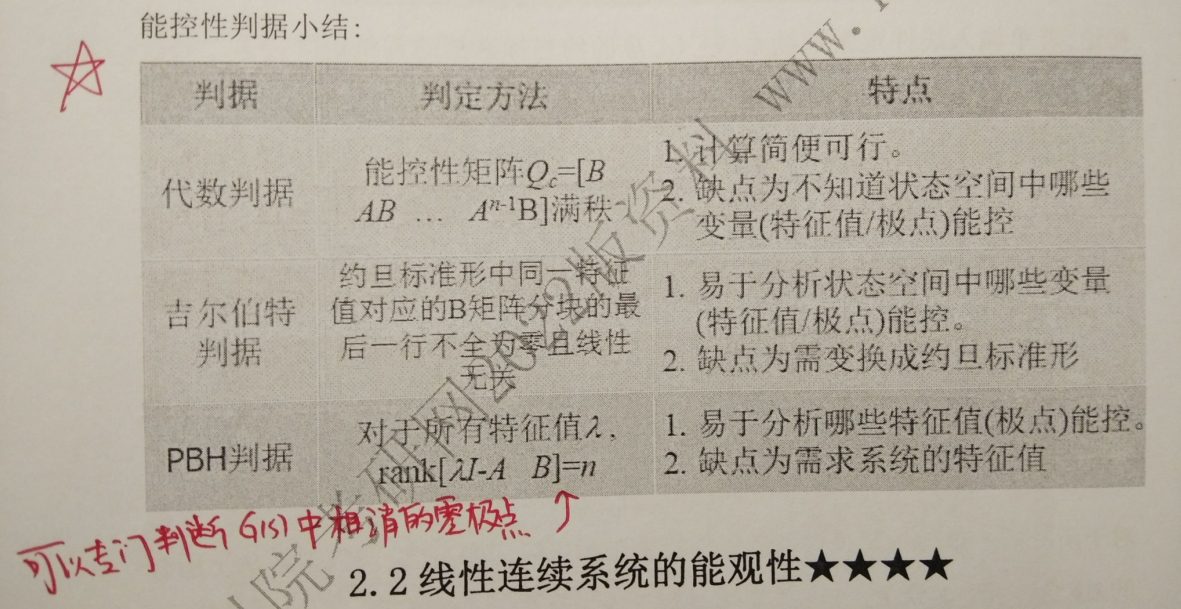
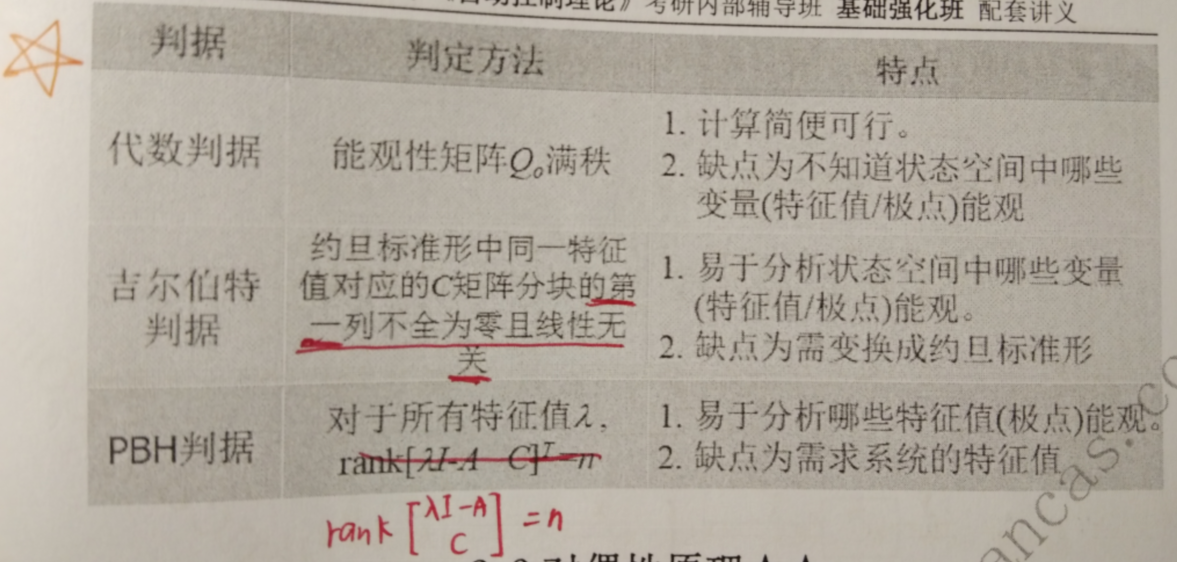
代数判据、秩判据: \(Q_c=[B,AB,A^2B]\) 满秩
对于多输入系统,\(Q_c\) 不是方阵,列数大于行数,可以任取三列,只要行列式不为零就可以了. 还可以根据 \(r(Q_cQ_c^T)=r(Q_c)\), 与自己的转置相乘后,化成方阵.
-
吉尔伯特判据:
- 对应 A 的每个约当块的 B 的分块的最后一行不全为零
- 若某个特征值存在多于一个约当块,还需要对应 A 的每个相同特征值约当块的 B 的分块的最后一行线性无关. (最后一行全为 0 则线性相关)
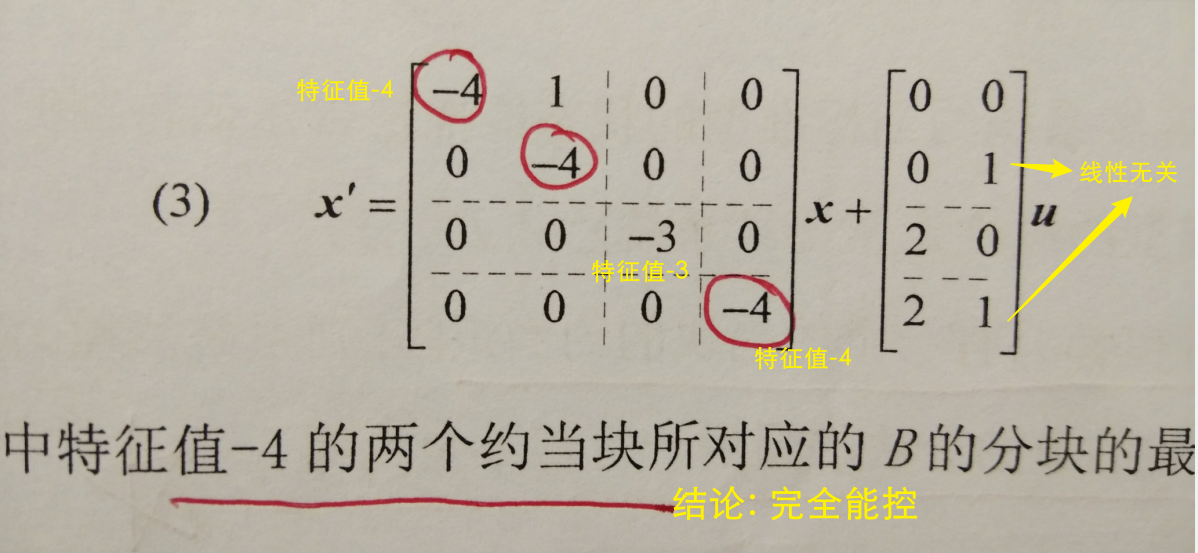
哪一个特征值对应的约当块出问题,就说明该特征值对应极点不能控.
对角矩阵每一个对角元素都是一个约当块 -
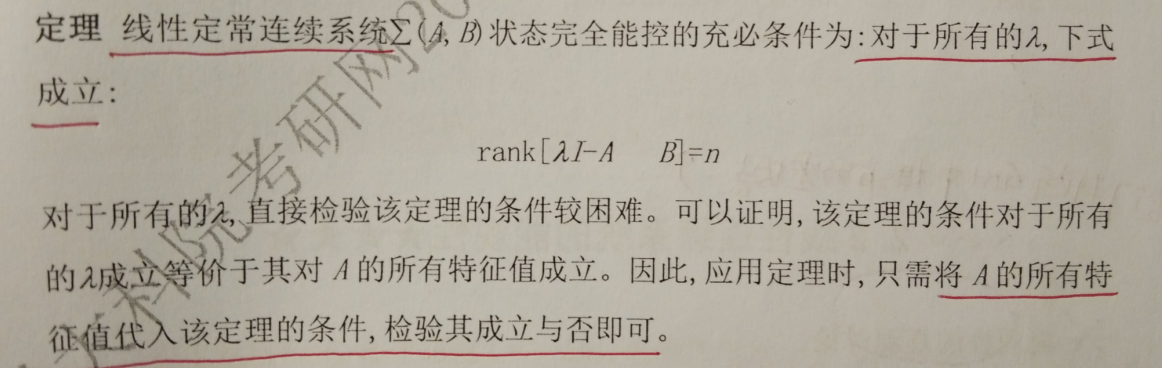
PBH 判据
2 能观性¶
2.1 概念¶
有限时间区间内测量 y, 可以唯一确定 \(x_0\)
- 对于连续时间系统,能观等价于能重构.
- 非奇异变换不改变能观性. \(\hat Q_o=Q_oT\)
2.2 能观性判据¶
- 模态判据:解耦,化成对角标准型(约当标准型), 输出矩阵 C 不包含全零列(对于约当标准型. 略
- 代数判据:\(Q_o=[C,CA,CA^2]^T\) 满秩
-
吉尔伯特判据:
- 对应 A 的每个约当块的 C 的分块的最第一列不全为零
- 若某个特征值存在多于一个约当块,还需要对应 A 的每个相同特征值约当块的 C 的分块的第一列线性无关. (第一列全为 0 则线性相关)
哪一个特征值对应的约当块出问题,就说明该特征值对应极点不能观.
对角矩阵每一个对角元素都是一个约当块 -
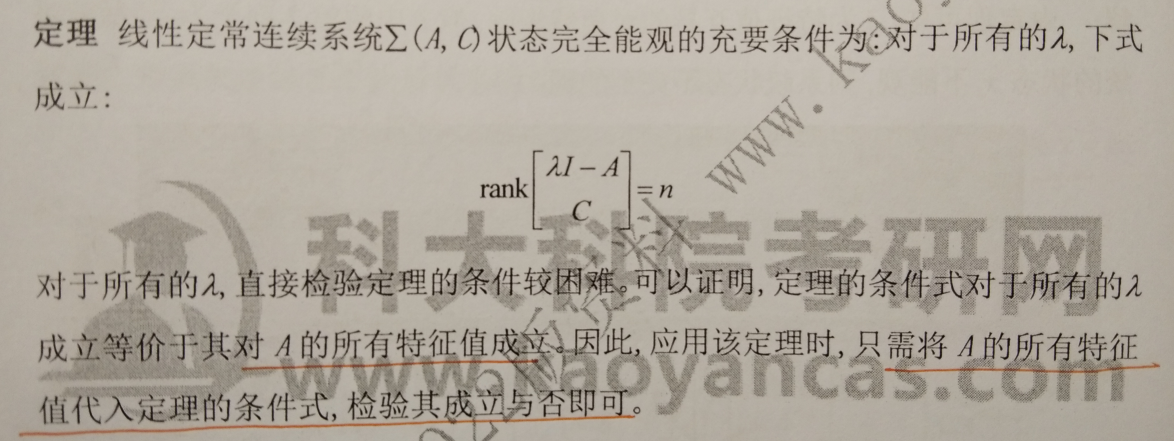
PBH 判据:
3 对偶性¶
\(\sum_1(A,B,C)\leftrightarrow \sum_2(A^T,C^T,B^T)\)
- 1 的能控性等价于 2 的能观性,1 的能观性等价于 2 的能控性 (根据代数判据那里进行转换可证明)
- 互为对偶系统的传递函数阵互为转置
- 特征方程相同,特征值相同 (\(A,A^T\)特征值相同)
- 最优控制问题和最优估计问题可以相互转化.
4 系统变换¶
- 对于完全能控/完全能观的系统,可以通过线性变换化为能控/能观标准型
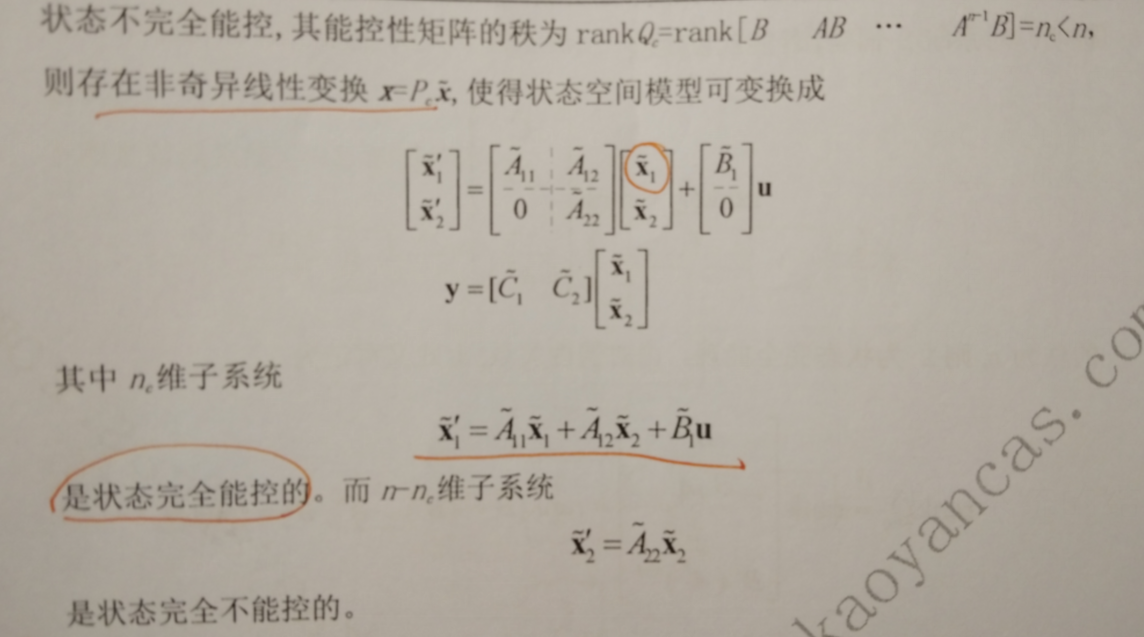
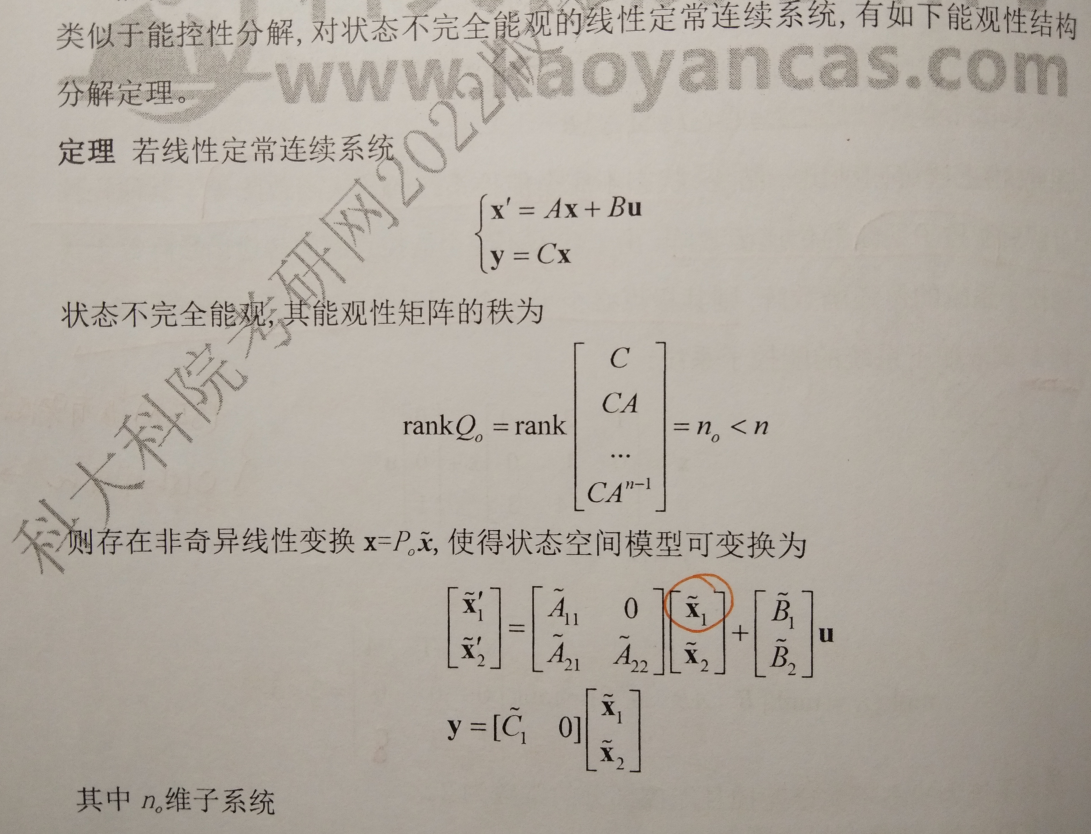
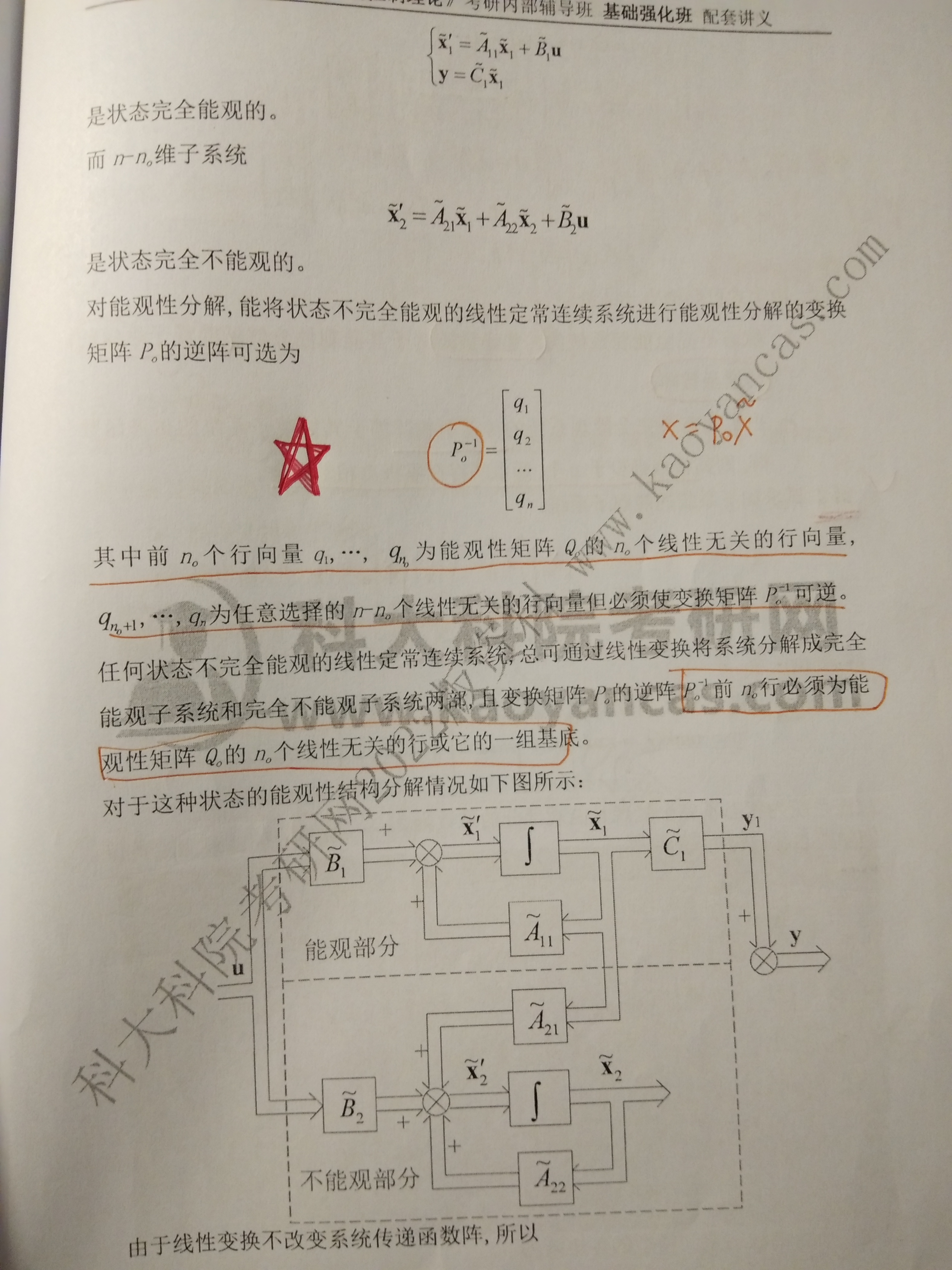
- 对于不完全能控/能观的系统,可以通过线性变换分解为能控子系统和能观子系统.
上述两者其实都是遵循某种步骤对状态空间方程进行线性变换,从而便于后续其他处理. 所以这里放在一起.

4.1 能控标准型和能观标准型¶
线性系统理论(三)能控和能观标准型 - 知乎 (zhihu.com)
能控标准 I 型,能观标准 II 型
坐标变换 \(X=T\hat X\)
\(\hat A=T^{-1}AT\), \(\hat B=T^{-1}B\), \(\hat C=CT\)
能控标准 I 型 (B 的最后一行是 1)
- 求\(Q_c\)满秩则能控
- 取\(p_1=[0,0,...,1]Q_c^{-1}\) 最后一行
- \(T^{-1}=[p_1,p_1A,...]^{T}\)
能观标准 II 型 (C 的最后一列是 1)
- 求\(Q_o\)满秩则能观
- 取\(p_1=Q_o^{-1}[0,0,...,1]^T\) 最后一列
- \(T=[p_1,Ap_1,...]\)
4.2 线性系统的结构性分解¶
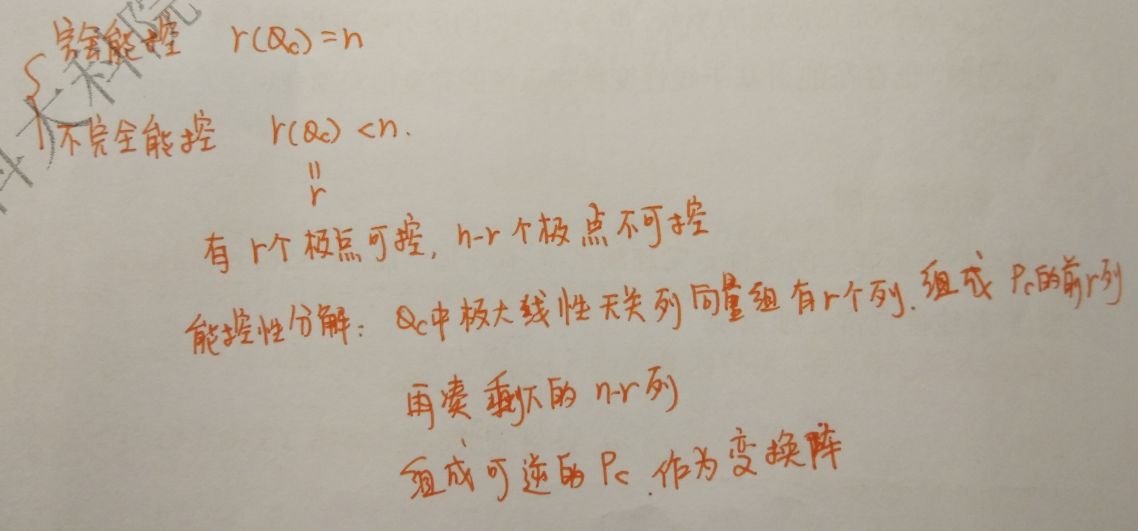
4.2.1 能控性分解¶
4.2.2 能观性分解¶
4.2.3 其他¶
这部分来自于看的清华大学那个网课,和上面差不多
通过\(X=T\hat X\)进行坐标变换.
-
能控状态分解:\(r(Q_c)=r<n\) , 选择 r 个线性无关的列作为 T 的前 r 列,再构造剩余 n-r 列,使 T 满秩.
变换后前 r 列对应能控部分
-
能观状态分解:\(r(Q_o)=r<n\) , 选择 r 个线性无关的行作为 T 的前 r 行,再构造剩余 n-r 行,使 T 满秩.
- 卡尔曼分解(略
5 传递函数阵¶
5.1 定义¶
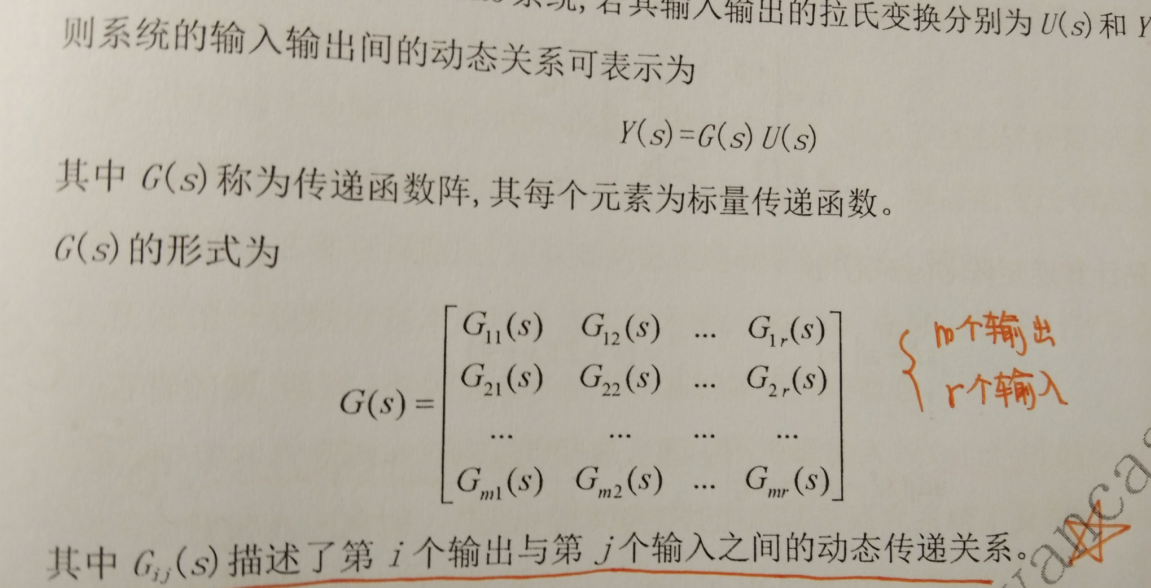
线性定常连续系统传递函数阵为 \(G(s)=C(sI-A)^{-1}B+D\)
- 输入输出间无直接关联项的系统 \(D=0\) (我觉得可以从微分方程输入输出阶数/传递函数分子分母阶数理解,一般分子阶数大于分母阶数)
- 求传递函数阵则默认零初始状态 \(X(0)=0\)
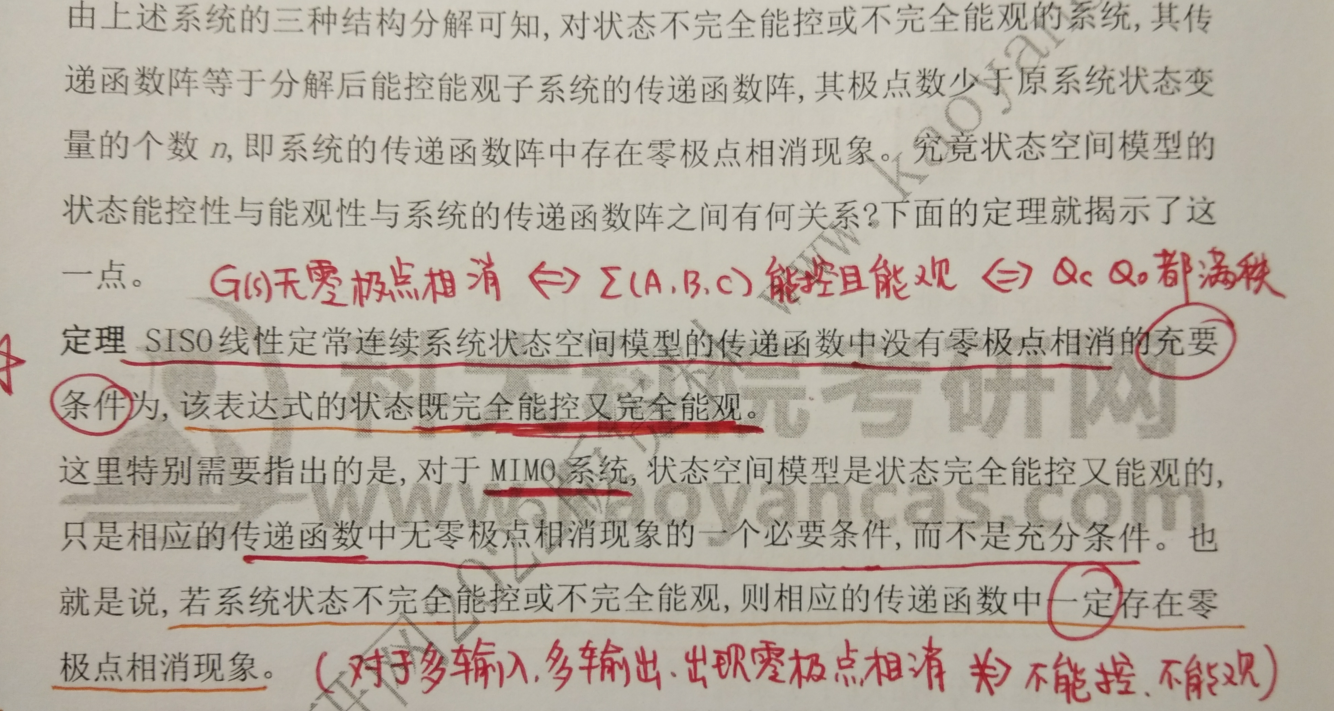
5.2 结构性分解和零极点相消¶
对于单输入单输出,传递函数有零极点相消,则不能控或者不能观.
传递函数只反映能控能观部分,能控子系统的传递函数和整体的传递函数相同.
- \((sI-A)^{-1}B\) 有零极点相消,则相消对应的极点不能控
- \(C(sI-A)^{-1}\) 有零极点相消,则相消对应的极点不能观
5.3 传递函数的实现问题¶
Note
其实传递函数就是常系数线性微分方程的一个转换形式,很容易进行互相转换. 所以 微分方程/传递函数 → 状态空间方程,方法可迁移
之所以说是实现问题, 是考虑到传递函数(对于现代控制理论来说)不反应系统的全部信息(不能控/不能观的部分), 并且由于状态变量选择并非唯一,因此由传递函数写状态空间方程有无数种情况.
-
SISO 的能控标准型实现:
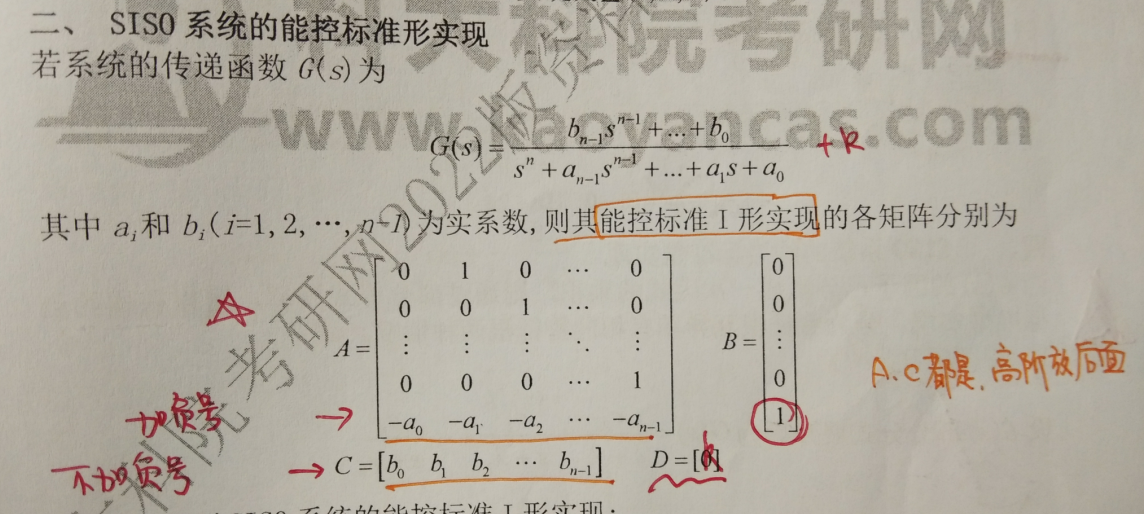
- 传递函数一般分母阶数高于分子阶数,如果分子分母同阶,需要先化简成上图形式,多一个 k, 即为 D
- 只要 G 化简,分子分母没有公因子(没有零极点相消),写出能控标准型,同时也一定能观
-
SISO 的能观标准型实现:
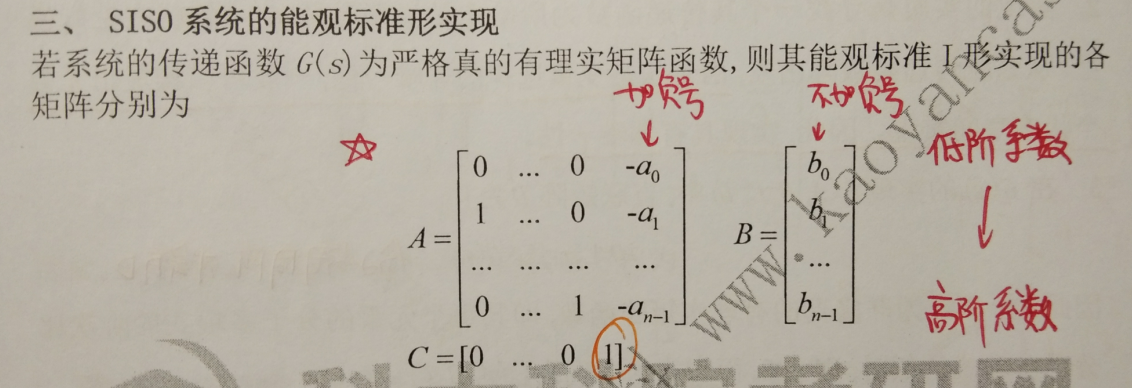
-
SISO 的约当标准型实现:
略。..
5.3.1 最小实现问题¶
最小实现问题:阶数最小、状态变量个数最小
给定传递函数阵的最小实现 \(\Leftrightarrow\) 写出的状态方程完全能控,完全能观
既能控又能观部分与传递函数相对应,阶数是相同的. 不同的最小实现之间代数等价.
多变量系统的最小实现 (清华那个网课记的... 现在不知道在说些什么了)
- 卡尔曼方法直接求(略
- 先求完全能控,再能观分解,能观子系统就是最小实现.