无人艇¶
1 坐标表示¶
- NED(North-East-Down)坐标系 以地球表面上的一点作为原点,坐标系的Ⅹ 轴指向北向,Y 轴指向东向,并且Ⅹ轴和 Y 轴构成的平面与地球表面相切,Z 轴指向地心,它是地理参考坐标系的一种。对于无人艇而言,可以认为该坐标系是一个惯性坐标系。
- 艇体固定坐标系 以艇体上的重心为原点,x 轴的正向表示船艏 (shou), y 轴的正向表示船的右舷,oz 轴正向指向地心.
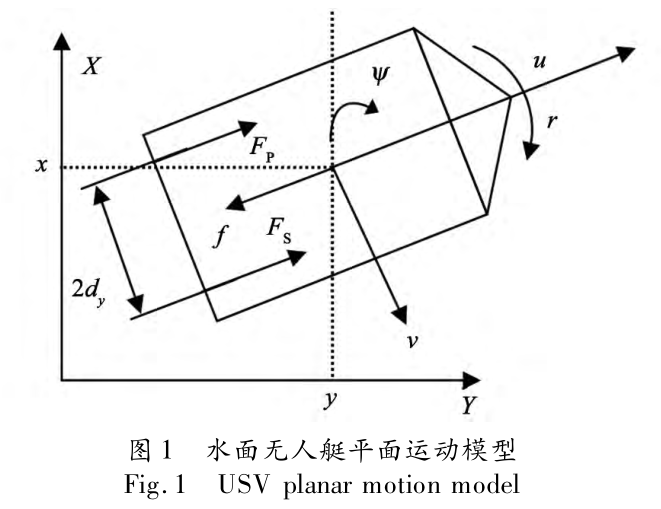
无人艇在地球固定 NED 坐标系中的水平面运动示意图如上,几个需要注意的地方:
(x,y)为无人艇在 NED 坐标系中的位置. 注意这里 XY 坐标轴位置和平时的不太一样- \(\Psi\) 为无人艇的艏摇角(船舶相对于地理北方的航向角,以正北为零度,顺时针取)。艏摇角速度 \(r=\dot{\Psi}\).
- 前进速度 u, 横漂速度 v
- 该平面运动模型中无人艇的运动控制来自于左右两个推力\(F_p,F_S\)
- 前进方向螺旋桨推力 \(\tau_u=F_p+F_s\)
- 转向控制力矩 \((F_p-F_s) d_y\).
\(d_y\) 是图中螺旋桨推力作用点到质心轴线(转轴)的垂直距离.
注意这里\(F_p\cdot d_y\) 的方向是顺着 \(\Psi\) 增加的角度的.
- 垂荡(heave)、横荡(sway)、纵荡(surge)、纵摇(pitch)、横摇(roll)、艏摇(yaw)--- 航行的船舶可产生的 6 个自由度的运动分量.

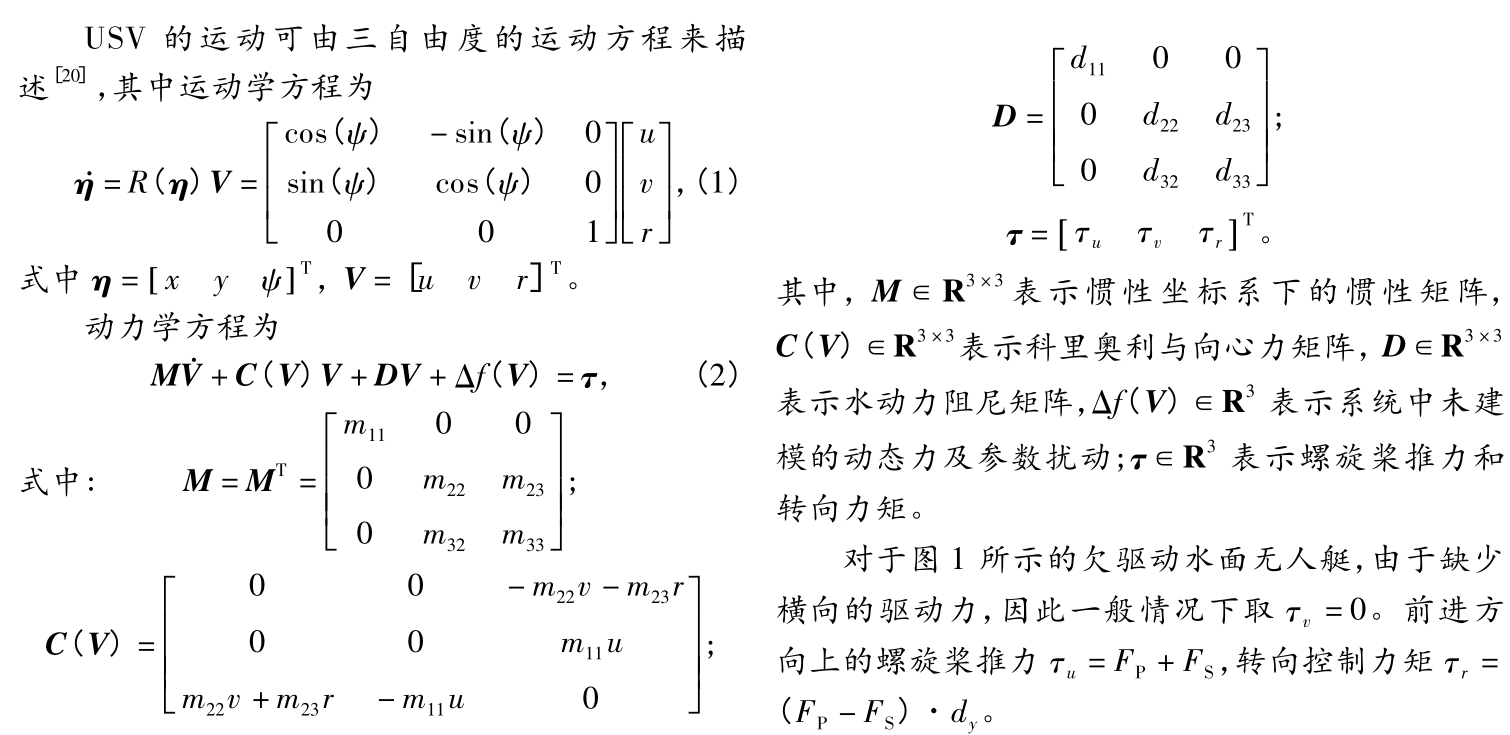
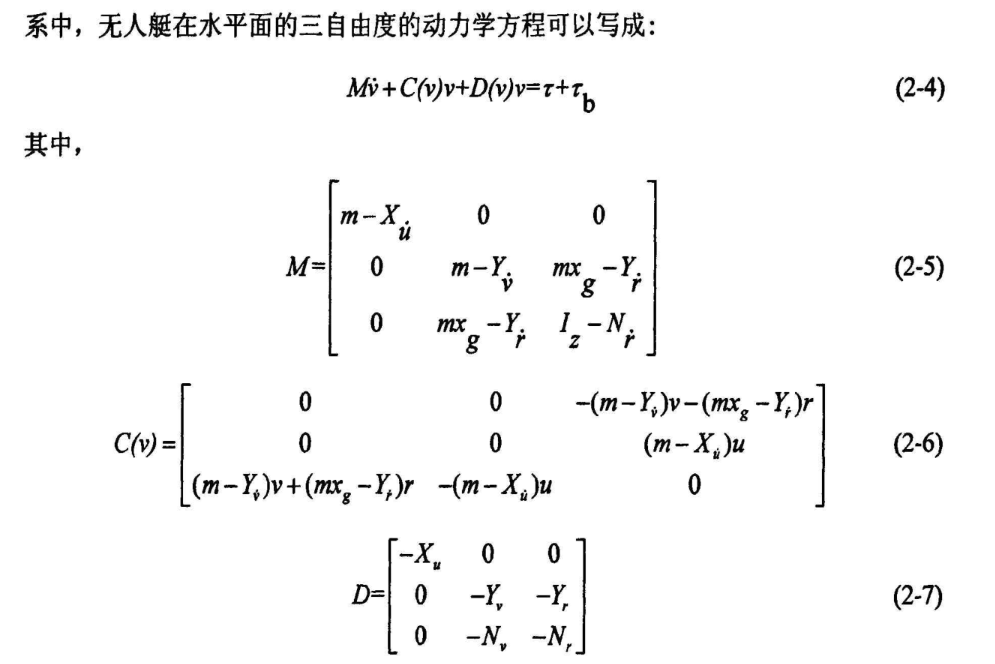
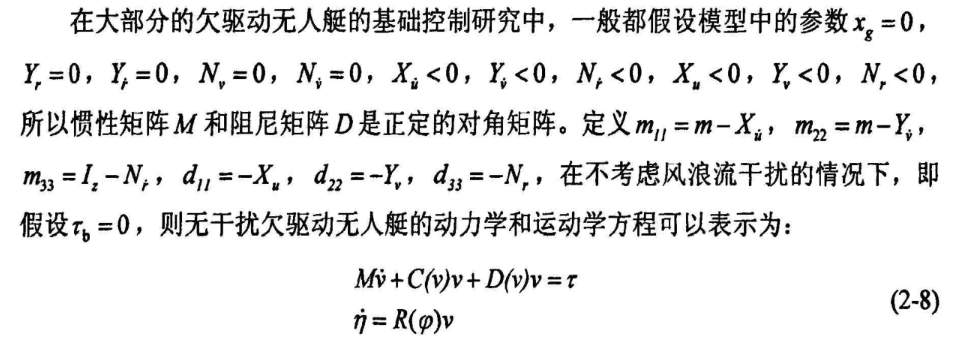
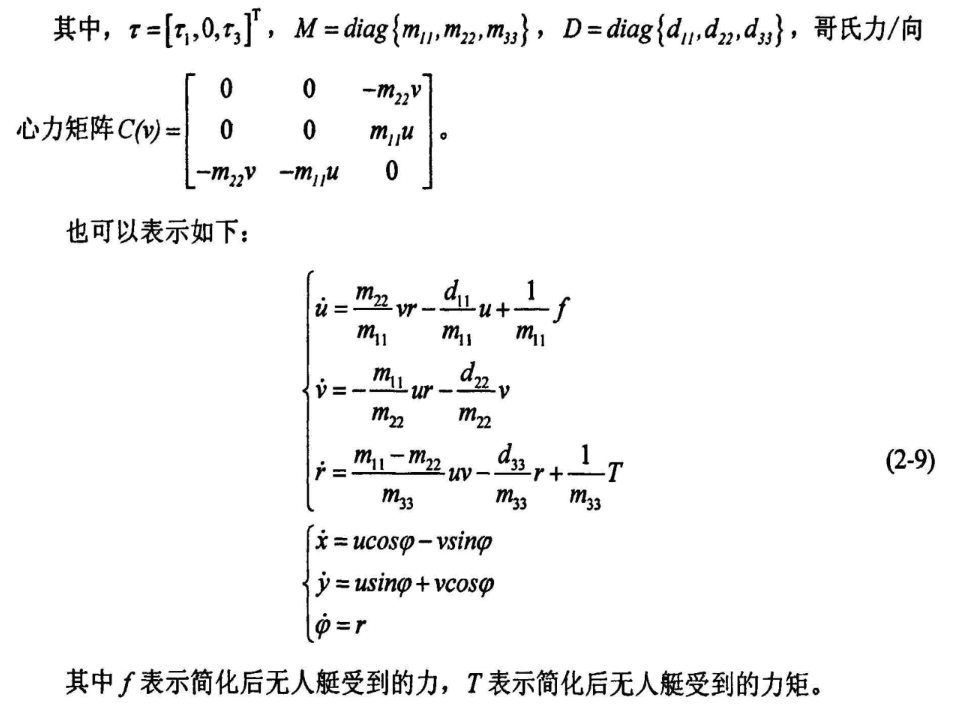
2 运动学方程¶
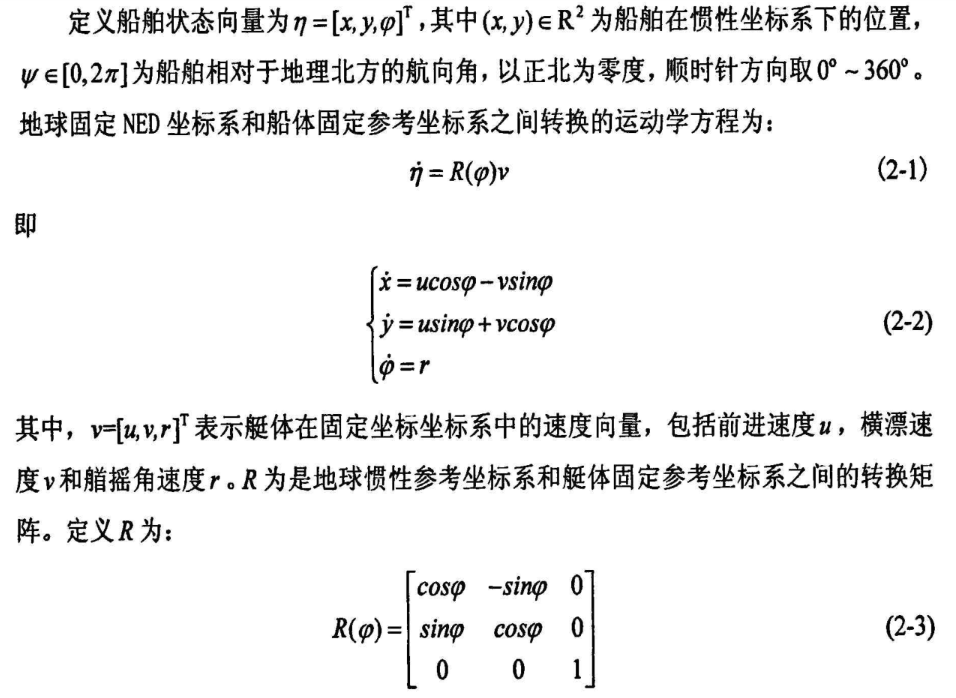
\(\psi\) 的单位是 \(rad/s\),